Description
This parameter selects the electronic gearing mode at the beginning of the electronic gearing procedure. The gearing mode determines drive synchronization. In the context of electronic gearing, synchronization means that the slave follows the master pulses without losing counts due to acceleration or velocity limitations.
- Mode 0: The slave is not immediately synchronized after a GEAR.MOVE command. The slave accelerates until the master velocity (velocity after the gearing) has been reached. The drive is synchronized as soon as the velocity of the master has been reached.
- Mode 1: The slave is immediately synchronized after a GEAR.MOVE command.
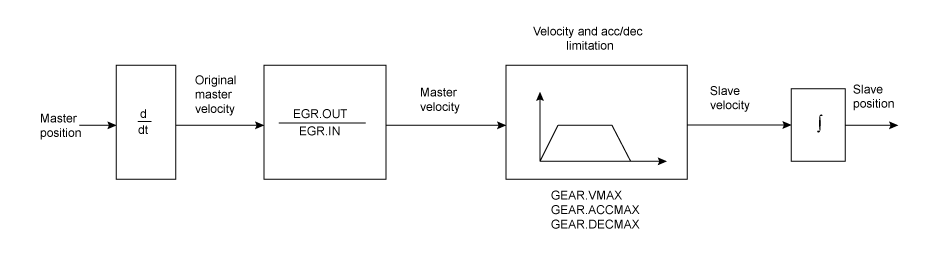
Block diagram of the electronic gearing feature
The slave position is forwarded to the position loop. Ensure that DRV.OPMODE has been set to 2 and DRV.CMDSOURCE has been set to 2. The slave is able to reach the master velocity according to the GEAR.VMAX setting. GEAR.VMAX does not limit the slave velocity.
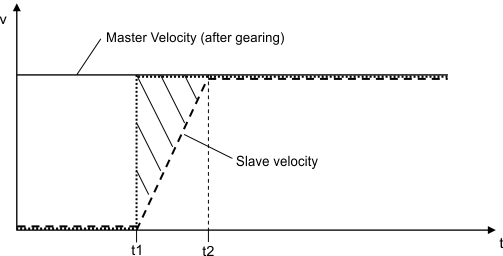
Acceleration process for GEAR.MODE 0
| Time | Description |
|---|---|
|
t<t1 |
The master sends already signals to the slave drive, but the GEAR.MOVE command has not been triggered yet. |
|
t = t1 |
A GEAR.MOVE command has been triggered. |
|
t1<t<t2 |
The slave accelerates according to the GEAR.ACCMAX setting. The position, which is marked with solid lines, will be ignored. |
|
t=t2 |
The slave has reached the master velocity and is from now on considered as synchronized. Synchronization means that the slave will not lose any more position counts coming from the master. |
|
t>t2 |
The slave follows the master input signals. |
General Information
|
Type |
NV Parameter |
|
Units |
N/A |
|
Range |
0 to 1 |
|
Default Value |
0 |
|
Data Type |
Integer |
|
See Also |
N/A |
|
Start Version |
M_01-00-00-000 |
Variants Supported
| Variant | Supported |
|---|---|
| AKD Base | Yes |
| AKD with Position Indexer | Yes |
| AKD EtherCAT | Yes |
| AKD CANopen | Yes |
| AKD BASIC | No |
| AKD SynqNet | Yes* |
| AKD EtherNet/IP | Yes |
| AKD PROFINET | Yes |
| AKD Sercos® III | Yes |
| AKD-N | No |
| AKD-C | No |
*In SynqNet, a parameter may be available in the firmware but have no effect on the system. See SynqNet Supported Parameters.
Fieldbus Information
If your drive type is listed as supported but no index, address, or instance number is listed, then this parameter is accessible through WorkBench, but not over your fieldbus type.
| Index/Subindex | Object Start Version |
|---|---|
|
50BCh /0 |
M_01-00-00-000 |
| Fieldbus | Address | Attributes | Signed? |
|---|---|---|---|
|
PROFINET |
2188 | Word | No |
| Sercos® III | 2 Octets |
| Instance | Data Size | Data Type |
|---|---|---|
| 189 | 2 Byte | Integer |
| Register Address | Is 64 bit? | Attributes | Signed? | Object Start Version |
|---|---|---|---|---|
|
376 |
No | 16 bit | No | M_01-03-00-000 |
Related Topics






