Description
VL.KP sets the proportional gain of the velocity loop.
The idealized velocity loop bandwidth in Hz is:
Rotary motor:
Bandwidth (Hz) = VL.KP *Kt/ (2π *Jm)
Where:
Kt= motor torque constant, in units of Nm/Arms
Jm = motor inertia, in units of kg*m²
Linear motor:
Bandwidth (Hz) = VL.KP * Kt / (Motor Pitch (mm) * Jm)
Where:
Kt= motor torque constant, in units of Nm/Arms
Jm = motor inertia, in units of kg
The drive uses the same control loop for both linear and rotary motors. VL.KP units are in Arms /(rad/s). If you want to tune in units of Arms/(mm/s), then you must manually convert the units.
The diagram below shows how linear motors are implemented at the control loop level.
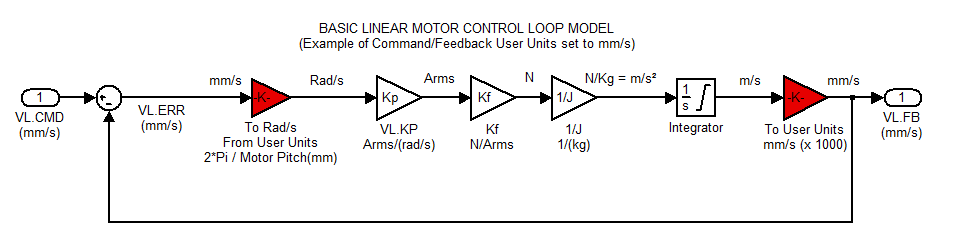
The red blocks are automatically handled at the drive level.
2π radians is the linear equivalent of one full mechanical revolution of a rotary motor - and is equal to the MOTOR.PITCH of a linear motor.
Example
To convert VL.KP = 0.320 Arms/(rad/s) to Arms/(mm/s), where MOTOR.PITCH is 32 mm:
VL.KP = 0.320 Arm /rad/s * (2π rad / 32mm MOTOR.PITCH)
VL.KP = 0.32 * 2π / 32 = 0.063 Arms / (mm/s)
General Information
|
Type |
NV Parameter |
|
Units |
A/(rad/sec) |
|
Range |
0.001 to 2,147,483.008 |
|
Default Value |
1 |
|
Data Type |
Float |
|
See Also |
|
|
Start Version |
M_01-00-00-000 |
Variants Supported
| Variant | Supported |
|---|---|
| AKD Base | Yes |
| AKD with Position Indexer | Yes |
| AKD EtherCAT | Yes |
| AKD CANopen | Yes |
| AKD BASIC | Yes |
| AKD SynqNet | Yes* |
| AKD EtherNet/IP | Yes |
| AKD PROFINET | Yes |
| AKD Sercos® III | Yes |
| AKD-N | Yes |
| AKD-C | No |
*In SynqNet, a parameter may be available in the firmware but have no effect on the system. See SynqNet Supported Parameters.
Fieldbus Information
If your drive type is listed as supported but no index, address, or instance number is listed, then this parameter is accessible through WorkBench, but not over your fieldbus type.
| Index/Subindex | Object Start Version |
|---|---|
|
3548h/0 |
M_01-00-00-000 |
| Fieldbus | Address | Attributes | Signed? |
|---|---|---|---|
|
PROFINET |
2436 |
DWord | No |
| Sercos® III | 4 Octets |
| Instance | Data Size | Data Type |
|---|---|---|
| 437 | 4 Byte | Float |
| Register Address | Is 64 bit? | Attributes | Signed? | Object Start Version |
|---|---|---|---|---|
|
872 |
No | 32 bit | No | M_01-03-00-000 |






