![]()
![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Writes a drive
A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Writes a drive![]() In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. parameter by sending an ASCII
In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. parameter by sending an ASCII![]() American Standard Code for Information Interchange - ASCII provides a one-to-one mapping between alphanumeric characters and a digital one-byte word. command to a drive.
American Standard Code for Information Interchange - ASCII provides a one-to-one mapping between alphanumeric characters and a digital one-byte word. command to a drive.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Execute |
BOOL |
FALSE, TRUE |
N/A |
No default |
On the rising edge
|
|
Drive |
INT |
-32768 to +32767 |
N/A |
No default |
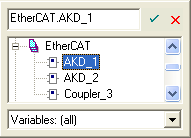
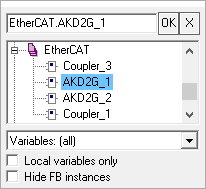
The address of the drive where data is written.
|
|
Param |
STRING |
No range |
N/A |
No default |
The parameter to write. |
|
Value |
LREAL |
No range |
N/A |
No default |
The value to set the drive parameter to. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
FALSE, TRUE |
N/A |
Indicates whether this function block has completed without error. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Indicates whether this function block has completed with error. |
|
ErrorID |
DINT |
No range |
N/A |
The DriveParamWrite error result if Error is TRUE. Upon success, Error is set to 0 (zero). See the EtherCAT Error Codes. |
Remarks
-
-
This function block uses and reserves the EtherCAT SDO Channel.
The SDO Channel remains reserved until the done output is TRUE.
This FB should be called at each cycle until either the Done or Error output is TRUE.
If it is not called at each cycle, the rest of SDO communication (e.g., the AKD GUI Graphical User Interface - A type of user interface which allows people to interact with a computer and computer-controlled devices. Views) is blocked.
Graphical User Interface - A type of user interface which allows people to interact with a computer and computer-controlled devices. Views) is blocked.
Using this FB in SFC Sequential function chart - It can be used to program processes that can be split into steps.
The main components of SFC are:
- Steps with associated actions.
- Transitions with associated logic conditions.
- Directed links between steps and transitions. P0 or P1 steps is not recommended because these steps are executed only once.
If this FB is used in P0 or P1, then it must be used in an SFC N step to ensure the FB completes.
- Use this function block to change drive parameters.
Examples include:- Tuning parameters.
- Changing drive limits (i.e., peak current The effective value of the peak current.
AKA: Ipeak.).
- It takes multiple cycles to complete this function block.
- Typically only one DriveParamRead or DriveParamWrite function should be active for each axis at one time.
- If executing this function block continuously or if multiple times is required, add code that waits for this function block to complete (e.g., Done bit = 1) before executing it again.
- See stats about the Execution Time.
- See EtherCAT Function Blocks that Work with Drive Parameters about function blocks not supported by ML and MC function blocks.
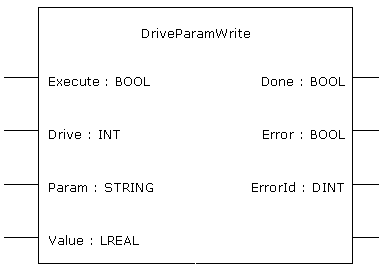
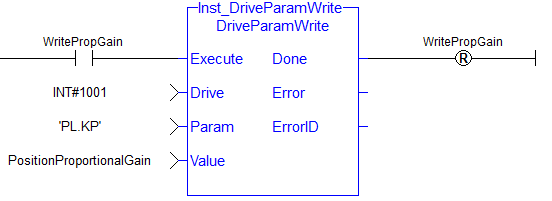
Figure 1: DriveParamWrite
EtherCAT Error Codes
|
Value Dec (hex) |
Error Code |
Description |
|---|---|---|
|
0 |
ECERR_OK |
The SDO call succeeded. |
|
1000 (0x3E8) |
ECERR_DEVICE_ACTION_IS_INVALID |
The requested Device Action is invalid. |
|
1003 (0x3EB) |
ECERR_DEVICE_ACTION_MINIMUM_ONE_NODE_REQD |
A minimum of one device must be present in the EtherCAT network. |
|
1004 (0x3EC) |
ECERR_DEVICE_ACTION_MINIMUM_ONE_DC_NODE_REQD |
A minimum of one Distributed clock |
|
107 = 0x6B |
The size of the connections is too small.
|
|
|
1792 (0x700) |
ECERR_DEVICE_ERROR |
EtherCAT device is not accessible. |
|
1794 (0x702) |
ECERR_DEVICE_INVALIDCMD |
Invalid mailbox command. |
|
1795 (0x703) |
ECERR_DEVICE_INVALIDINDEX |
An invalid value for the Index |
|
1796 (0x704) |
ECERR_DEVICE_INVALIDACCESS |
Reading of the variable is not permitted. |
|
1797 (0x705) |
ECERR_DEVICE_INVALIDSIZE |
An invalid size for the parameter was specified. |
|
1798 (0x706) |
ECERR_DEVICE_INVALIDDATA |
Invalid parameter value(s) in SDO index and/or sub-index. |
|
1799 (0x707) |
ECERR_DEVICE_NOTREADY |
Device is not in a ready state. The network is not in operational. |
|
1800 (0x708) |
ECERR_DEVICE_BUSY |
Device is not available to respond. |
|
1801 (0x709) |
ECERR_DEVICE_INVALIDCONTEXT |
Device responded with an illegal error code, indicating the command is not allowed under the present conditions. |
|
1802 (0x70A) |
ECERR_DEVICE_NOMEMORY |
EtherCAT mailbox is out of memory or device is out of disk space. |
|
1803 (0x70B) |
ECERR_DEVICE_INVALIDPARM |
EtherCAT mailbox request was not valid. |
|
1804 (0x70C) |
ECERR_DEVICE_NOTFOUND |
EtherCAT device not found. |
|
1805 (0x70D) |
ECERR_DEVICE_SYNTAX |
An unexpected error occurred. |
|
1810 (0x712) |
ECERR_DEVICE_INVALIDSTATE |
The EtherCAT device is in an invalid state. |
|
1817 (0x719) |
ECERR_DEVICE_TIMEOUT |
|
|
1826 (0x722) |
ECERR_DEVICE_INSERTMAILBOX |
Error while inserting the mailbox command into internal FIFO. |
|
1827 (0x723) |
ECERR_DEVICE_INVALIDOFFSET |
An invalid value for the SubIndex input was specified. |
|
1828 (0x724) |
ECERR_DEVICE_UNKNOWNMAILBOXCMD |
The master sent an unknown mailbox command to the slave. |
|
1829 (0x725) |
ECERR_DEVICE_ACCESSDENIED |
Device responded with an invalid access error code, indicating the command is not allowed. |
|
1832 (0x728) |
ECERR_DEVICE_INVALIDADDR |
The specified EtherCAT node address is invalid. |
|
1836 (0x72c) |
ECERR_DEVICE_NOT_A_FSOE_MASTER |
Device is not a FSoE master. |
|
1837 (0x072D) |
ECERR_DEVICE_DISCONNECTED |
The EtherCAT device is disconnected. |
|
1920 (0x780) |
ECERR_DEVICE_PARAM_ACCESS_ERROR |
Unknown error occurred while accessing parameter. |
|
1921 (0x781) |
ECERR_DEVICE_PARAM_NOT_FOUND |
Parameter was not found. |
|
1922 (0x782) |
ECERR_DEVICE_PARAM_NOT_INTEGER |
Parameter is a floating-point value. Integer value required. |
|
1923 (0x783) |
ECERR_DEVICE_VALUE_IS_NEGATIVE |
No negative values allowed. Value specified was negative. |
|
1924 (0x784) |
ECERR_DEVICE_VALUE_OUT_OF_RANGE |
Value is out of data-range. |
|
1925 (0x785) |
ECERR_DEVICE_VALUE_GREATER_THAN_MAX |
Value bigger than maximum. |
|
1926 (0x786) |
ECERR_DEVICE_VALUE_LOWER_THAN_MIN |
Value lower than minimum. |
|
2048 (0x800) |
ECERR_CLIENT_ERROR |
Error in Mailbox response to a previously sent mailbox command. |
|
2049 (0x801) |
ECERR_CLIENT_TIMEOUT |
The SDO command timed out. |
|
2050 (0x802) |
ECERR_CLIENT_ INVALIDPARM |
An invalid value was specified. |
|
2051 (0x803) |
ECERR_CLIENT_ INVALIDSIZE |
An invalid value for the size input was specified. |
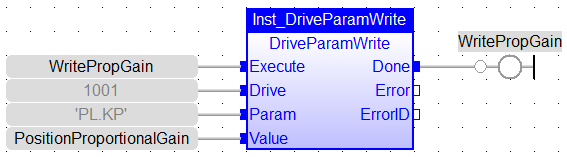
FBD Language Example
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* Write 58.000 to PL.KP Proportional gain of a control loop.
AKA: P-gain. of first AKD Drive on EtherCAT network *
Inst_DriveParamWrite( TRUE, 1001, 'PL.KP', 58 );
See Also






