![]()
![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Returns the EtherCAT
A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Returns the EtherCAT![]() Ethernet ofr Control Automation Technology.
EtherCAT® is an open, high-performance Ethernet-based fieldbus system.
The development goal of EtherCAT is to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs. device-specific information.
Ethernet ofr Control Automation Technology.
EtherCAT® is an open, high-performance Ethernet-based fieldbus system.
The development goal of EtherCAT is to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs. device-specific information.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
BOOL |
FALSE, TRUE |
N/A |
No default |
Requests to read the EtherCAT device-specifc parameter. |
|
|
DeviceAddress |
INT |
-32768 to +32767 |
N/A |
No default |
The address of the device data is read from.
|
|
ParameterNumber |
INT |
-32768 to +32767 |
N/A |
No default |
Parameter number. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
FALSE, TRUE |
N/A |
Indicates whether this function |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Indicates an invalid input was specified. |
|
ErrorID |
INT |
-32768 to +32767 |
N/A |
Indicates the error if Error output is TRUE. See Error Codes. |
|
Value |
LREAL |
No range |
N/A |
Value of the parameter. |
Remarks
See EtherCAT Function Blocks that Work with Drive Parameters about function blocks not supported by ML and MC function blocks.
Error Codes
|
Value Dec (hex) |
Error Code |
Description |
|---|---|---|
|
0 |
ECERR_OK |
The SDO call succeeded. |
|
1000 (0x3E8) |
ECERR_DEVICE_ACTION_IS_INVALID |
The requested Device Action is invalid. |
|
1003 (0x3EB) |
ECERR_DEVICE_ACTION_MINIMUM_ONE_NODE_REQD |
A minimum of one device must be present in the EtherCAT network. |
|
1004 (0x3EC) |
ECERR_DEVICE_ACTION_MINIMUM_ONE_DC_NODE_REQD |
A minimum of one Distributed clock |
|
107 = 0x6B |
The size of the connections is too small.
|
|
|
1792 (0x700) |
ECERR_DEVICE_ERROR |
EtherCAT device is not accessible. |
|
1794 (0x702) |
ECERR_DEVICE_INVALIDCMD |
Invalid mailbox command. |
|
1795 (0x703) |
ECERR_DEVICE_INVALIDINDEX |
An invalid value for the Index |
|
1796 (0x704) |
ECERR_DEVICE_INVALIDACCESS |
Reading of the variable is not permitted. |
|
1797 (0x705) |
ECERR_DEVICE_INVALIDSIZE |
An invalid size for the parameter was specified. |
|
1798 (0x706) |
ECERR_DEVICE_INVALIDDATA |
Invalid parameter value(s) in SDO index and/or sub-index. |
|
1799 (0x707) |
ECERR_DEVICE_NOTREADY |
Device is not in a ready state. The network is not in operational. |
|
1800 (0x708) |
ECERR_DEVICE_BUSY |
Device is not available to respond. |
|
1801 (0x709) |
ECERR_DEVICE_INVALIDCONTEXT |
Device responded with an illegal error code, indicating the command is not allowed under the present conditions. |
|
1802 (0x70A) |
ECERR_DEVICE_NOMEMORY |
EtherCAT mailbox is out of memory or device is out of disk space. |
|
1803 (0x70B) |
ECERR_DEVICE_INVALIDPARM |
EtherCAT mailbox request was not valid. |
|
1804 (0x70C) |
ECERR_DEVICE_NOTFOUND |
EtherCAT device not found. |
|
1805 (0x70D) |
ECERR_DEVICE_SYNTAX |
An unexpected error occurred. |
|
1810 (0x712) |
ECERR_DEVICE_INVALIDSTATE |
The EtherCAT device is in an invalid state. |
|
1817 (0x719) |
ECERR_DEVICE_TIMEOUT |
|
|
1826 (0x722) |
ECERR_DEVICE_INSERTMAILBOX |
Error while inserting the mailbox command into internal FIFO. |
|
1827 (0x723) |
ECERR_DEVICE_INVALIDOFFSET |
An invalid value for the SubIndex input was specified. |
|
1828 (0x724) |
ECERR_DEVICE_UNKNOWNMAILBOXCMD |
The master sent an unknown mailbox command to the slave. |
|
1829 (0x725) |
ECERR_DEVICE_ACCESSDENIED |
Device responded with an invalid access error code, indicating the command is not allowed. |
|
1832 (0x728) |
ECERR_DEVICE_INVALIDADDR |
The specified EtherCAT node address is invalid. |
|
1836 (0x72c) |
ECERR_DEVICE_NOT_A_FSOE_MASTER |
Device is not a FSoE master. |
|
1837 (0x072D) |
ECERR_DEVICE_DISCONNECTED |
The EtherCAT device is disconnected. |
|
1920 (0x780) |
ECERR_DEVICE_PARAM_ACCESS_ERROR |
Unknown error occurred while accessing parameter. |
|
1921 (0x781) |
ECERR_DEVICE_PARAM_NOT_FOUND |
Parameter was not found. |
|
1922 (0x782) |
ECERR_DEVICE_PARAM_NOT_INTEGER |
Parameter is a floating-point value. Integer value required. |
|
1923 (0x783) |
ECERR_DEVICE_VALUE_IS_NEGATIVE |
No negative values allowed. Value specified was negative. |
|
1924 (0x784) |
ECERR_DEVICE_VALUE_OUT_OF_RANGE |
Value is out of data-range. |
|
1925 (0x785) |
ECERR_DEVICE_VALUE_GREATER_THAN_MAX |
Value bigger than maximum. |
|
1926 (0x786) |
ECERR_DEVICE_VALUE_LOWER_THAN_MIN |
Value lower than minimum. |
|
2048 (0x800) |
ECERR_CLIENT_ERROR |
Error in Mailbox response to a previously sent mailbox command. |
|
2049 (0x801) |
ECERR_CLIENT_TIMEOUT |
The SDO command timed out. |
|
2050 (0x802) |
ECERR_CLIENT_ INVALIDPARM |
An invalid value was specified. |
|
2051 (0x803) |
ECERR_CLIENT_ INVALIDSIZE |
An invalid value for the size input was specified. |
EtherCAT Device Parameters
This is a list of supported parameters read by ECATDevReadParam.
|
Parameter |
ID |
Name |
R/W |
Description |
||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
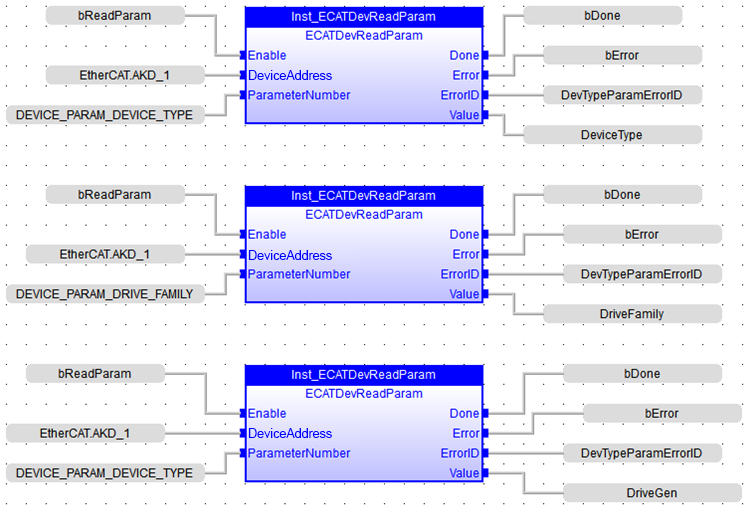
DEVICE_PARAM_DEVICE_TYPE |
1 |
Device Type |
Read Only |
EtherCAT Device Type
|
||||||||||||||||||
|
DEVICE_PARAM_DRIVE_FAMILY |
2 |
Drive Family |
Read Only |
EtherCAT device drive family details.
|
||||||||||||||||||
|
DEVICE_PARAM_DRIVE_GEN |
3 |
Drive Generation |
Read Only |
EtherCAT drive generation details.
|
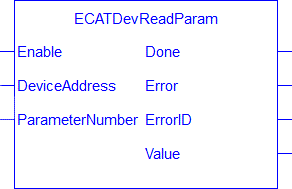
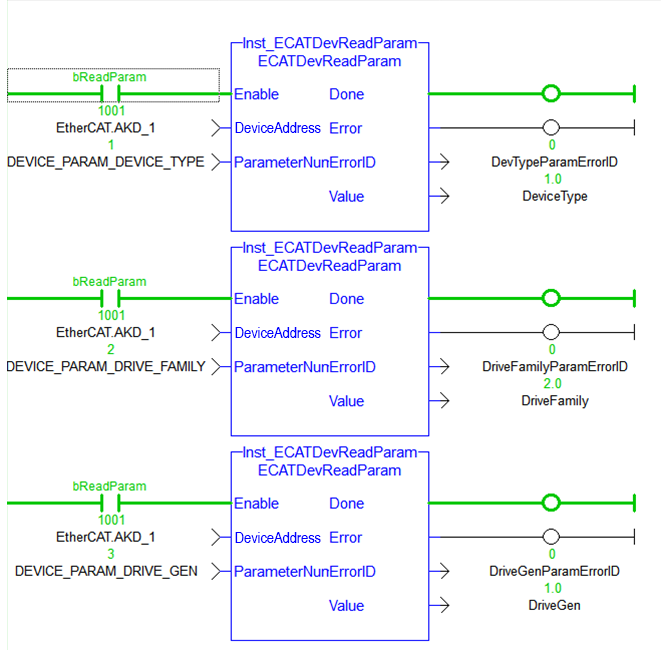
Figure 1: ECATDevReadParam
FBD Language Example
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* ECATDevReadParam STStructured text - A high-level language that is block structured and syntactically resembles Pascal. example *)
Inst_ECATDevReadParam( TRUE, EtherCAT.AKD_2, DEVICE_PARAM_DEVICE_TYPE );
DeviceType := Inst_ECATDevReadParam.Value;
Inst_ECATDevReadParam( TRUE, EtherCAT.AKD_2, DEVICE_PARAM_DRIVE_FAMILY );
DeviceFamily := Inst_ECATDevReadParam.Value;
Inst_ECATDevReadParam( TRUE, EtherCAT.AKD_2, DEVICE_PARAM_DRIVE_GEN );
DriveGen := Inst_ECATDevReadParam.Value;






