![]()
![]()
 Function
Function![]() A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. - Reads cyclic parameter (byte offset format).
A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. - Reads cyclic parameter (byte offset format).
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Offset |
UINT |
0 to 1500 |
Bytes |
No default |
Offset in bytes from the beginning of the frame The maximum size of an Ethernet
|
|
Nbytes |
SINT |
1, 2, or 4 |
Bytes |
No default |
Number of bytes to read. |
|
BOOL |
FALSE, TRUE |
N/A |
No default |
Direction of the frame.
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Value |
DINT |
No range |
N/A |
Value of the EtherCAT frame. |
Remarks
-
-
This is a low level function and should be used carefully by advanced users.
-
- The valid ranges for the Value parameter are:
For 1 byte: 0 to 255
For 2 bytes: 0 to 65535
For 4 bytes: -2147483648 to 2147483647 (The sign bit represents the most significant bit in the data word).
- Allows a direct access to the memory EtherCAT Process Image of the EtherCAT frame which is sent or received when you need to debug the application.
- Access the EtherCAT image element by giving the offset in the image and the size of the element.
- If you have a device other than the drive
 In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils., this function is used for more than just debug.
In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils., this function is used for more than just debug.- It is used to get the status of the module (e.g., Stepper I/O slice) in the case the project is based on an external XML Extensible Markup Language - A general-purpose markup language. It is classified as an extensible language because it allows its users to define their own tags. file because it contains unsupported EtherCAT device.
- See Add an Unsupported EtherCAT Device.
- It is used to get the status of the module (e.g., Stepper I/O slice) in the case the project is based on an external XML
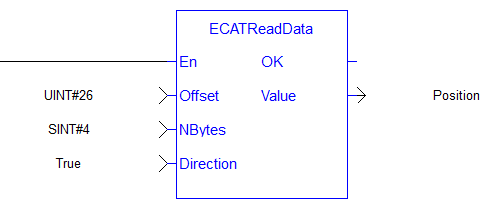
FBD Language Example

FFLD Language Example
IL Language Example
Not available.
ST Language Example
// Read 4 bytes starting at offset 26 of the output image
Position
See Also






