![]()
 Function
Function![]() A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. - Initializes an axis object.
A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. - Initializes an axis object.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
LREAL |
No range |
User unit/sec2 |
No default |
Sets the Axis Acceleration value. |
|
|
AxisID |
DINT |
No range |
N/A |
No default |
ID Name of the Axis block. |
|
Deceleration |
LREAL |
No range |
User unit/sec2 |
No default |
Sets the Axis Deceleration value. |
|
FeedbackUnitPerTurn |
DINT |
No range |
User units |
No default |
|
|
InitialPosition |
LREAL |
No range |
User units |
No default |
Initial position value expressed in user logical units.
|
|
Modulo |
BOOL |
FALSE, TRUE |
N/A |
No default |
Define the mode which can be Modulo (True) or not (False). |
|
ModuloPosition |
LREAL |
No range |
User units |
No default |
The value of the period The parameter is defined to correctly manage the periodicity (modulo) of the input values. |
|
Speed |
LREAL |
No range |
User units |
No default |
Sets the Axis Speed. |
|
UserUnitPerTurn |
LREAL |
No range |
User units |
No default |
Define the unit equivalent to one revolution of the physical motor |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Default (.Q) |
BOOL |
FALSE, TRUE |
N/A |
Returns TRUE when the function successfully executes. |
Remarks
- Returns TRUE if the function succeeded.
- The axis object can be mapped to servo or stepper drives
 In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils..
In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils..
FBD Language Example
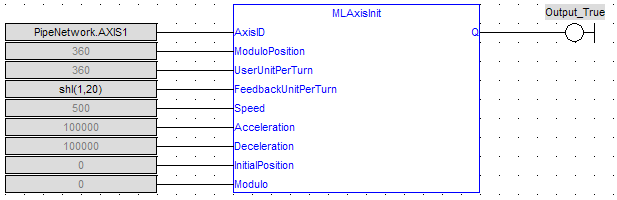
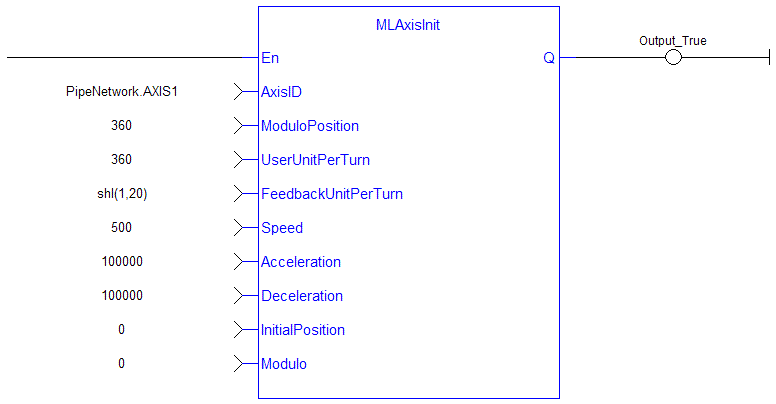
FFLD Language Example
IL Language Example
Not available.
ST Language Example
MLAxisInit( PipeNetwork.Axis1, 360.0, 360.0, SHL(1,20), 500.0, 100000.0, 100000.0, 0.0, true ) ;






