Axis Positions Data
Actual Position
This is the position![]() Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different. of the axis read from the drive
Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different. of the axis read from the drive![]() In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. interface, which is read from the feedback device
In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. interface, which is read from the feedback device![]() A process where some proportion of the output signal of a system is passed (fed back) to the input.
In automation, a device coupled to each motor to provide indication of the motor's shaft angle, for use in commutating the motor and controlling its speed and position.
Some systems use a feedback device connected to the motor shaft or part of the driven mechanism to control the direction, acceleration and speed of the motor..
A process where some proportion of the output signal of a system is passed (fed back) to the input.
In automation, a device coupled to each motor to provide indication of the motor's shaft angle, for use in commutating the motor and controlling its speed and position.
Some systems use a feedback device connected to the motor shaft or part of the driven mechanism to control the direction, acceleration and speed of the motor..
CommandPosition
This is the command position (without modulo and in the axis' user units) sent to the drive interface to command an axis.
This position is tied to the Status output of the MC_Power function block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs.:
A function block groups an algorithm and a set of private data.
It has inputs and outputs.:
- Status = 1: The command position is a combination of the Normal, Superimposed, and Phasing commands.
- Status = 0: The command position tracks
 Characterized by an axis group that follows with its movement the movement of another axis group. the Actual Position.
Characterized by an axis group that follows with its movement the movement of another axis group. the Actual Position.
CoordinatedMotionCmdPos
This is the command position generated by the Coordinated Motion Interpolator when interpolating coordinated motion moves.
Group Actual Position
This is the set of positions of an axes group read from the axis interface:
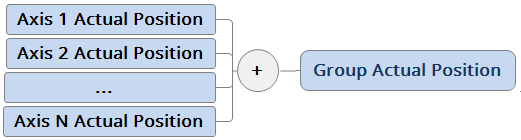
Figure 1: How Actual Position is Calculated
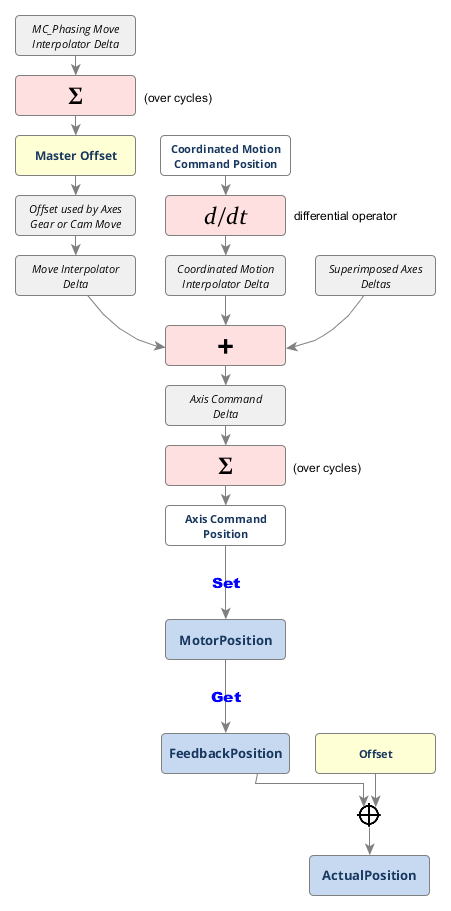
NormalCmdPos
This is the command position generated by the Normal Interpolator when interpolating a single axis move or a slave move.
PhaseCmd Pos
This is the command position generated by the Phasing Interpolator when interpolating a MC_Phasing master phase shift![]() Compensation for the lag between the electromagnetic and magnetic fields in the motor..
Compensation for the lag between the electromagnetic and magnetic fields in the motor..
It is incorporated in the generation of the NormalCmdPos when interpolating a slave move.
SuperimposedCmdPos
This is the command position generated by the Superimposed Interpolator when interpolating a MC_Superimp move

Figure 2: Calculated PLCopen Axis Position Data






