Add and Configure Third Party Devices
EtherCAT![]() Ethernet ofr Control Automation Technology.
EtherCAT® is an open, high-performance Ethernet-based fieldbus system.
The development goal of EtherCAT is to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs. devices physically connected to the network can be scanned and discovered.
Ethernet ofr Control Automation Technology.
EtherCAT® is an open, high-performance Ethernet-based fieldbus system.
The development goal of EtherCAT is to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs. devices physically connected to the network can be scanned and discovered.
- EtherCAT devices can be manually added to the EtherCAT node in the Project view.
- Manually added devices allow the project to be configured before connecting.
-
-
- KAS-IDE
 Kollmorgen Automation Suite - Integrated Development Environment does not support third-party drives In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils..
Kollmorgen Automation Suite - Integrated Development Environment does not support third-party drives In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils.. - The KAS Kollmorgen Automation Suite-IDE Integrated Development Environment - An type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger. supports third-party FSoE Masters.
- BBH SCU-1-EC support is integrated with the KAS-IDE and is recommended.
- Contact BBH for the latest ESI file that matches with the SCU-1-EC firmware version.
- See the BBH web-site for SCU-1-EC for more information.
- Other third-party FSoE Masters are possible but require the FSoE/Connected PDOs to be configured manually by the user.
- KAS-IDE
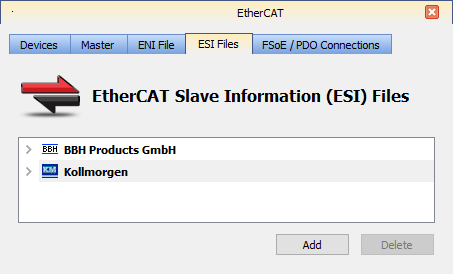
- In the Project View, double-click the EtherCAT node and select the ESI Files tab.

- Use the Add button to add ESI files from a third-party vendor.

- Navigate to where you have the third-party ESI file saved on your computer and click Open.
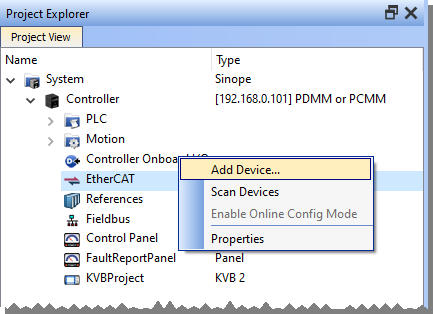
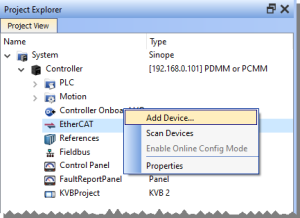
This adds the manufacturer and device to the list of available devices. - Right-click the EtherCAT node and select Add Device....
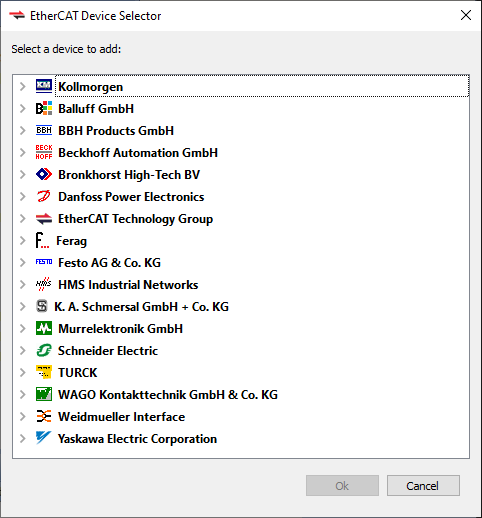
- Select the device from the EtherCAT Device Selector dialog box.
If a specific revision number is required, it may be selected from the drop-down list in the revision column.
The default selection is the highest revision number.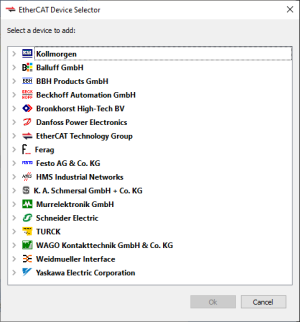
- Click Ok.
The device is added to the project tree in the EtherCAT node.