 ECATReadData
ECATReadData

-
-
This is a low level function and it should only be used carefully by advanced users.
Description
This function allows a direct access to the memory image of the EtherCAT![]() ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs frame which is sent or received when you need to debug your application. You access the EtherCAT image element by giving the offset in the image and the size of the element.
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs frame which is sent or received when you need to debug your application. You access the EtherCAT image element by giving the offset in the image and the size of the element.
If you have a device other than the drive, ECATReadData is used for more than just debug. It is used to get the status of the module (e.g. Stepper I/O slice).
Arguments
Input
| Offset | Description | Offset in bytes from the beginning of the frame
|
| Data type | UINT | |
| Range |
0-size of frame (maximum size of an Ethernet |
|
| Unit | bytes | |
| Default | — | |
| Nbytes | Description | Number of bytes to read |
| Data type | SINT | |
| Range | 1, 2 or 4 | |
| Unit | bytes | |
| Default | — | |
| Direction | Description | Direction of the frame (true = output image, false = input image). |
| Data type | BOOL | |
| Range | 0, 1 | |
| Unit | N/A | |
| Default | — |
-
- The valid ranges for the Value parameter are:
For 1 byte: 0 to 255
For 2 bytes: 0 to 65535
For 4 bytes: - 2147483648 to 2147483648 (The sign bit represents the most significant bit in the data word)
Output
| Value | Description | Value of the EtherCAT frame |
| Data type | DINT | |
| Unit | N/A |
Related Functions
Example
Structured Text
|
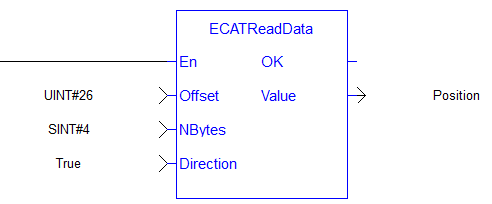
// Read 4 bytes starting at offset 26 of the output image
Position := ECATReadData(26, 4, true);
|
FBD

FFLD
 [Top]
[Top]





