 MLMotionRstErr
MLMotionRstErr

Description
Clears motion engine errors, motion bus driver errors, and EtherCAT![]() ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs network errors. MLMotionRstErr will return the motion engine status to the Stopped state. Returns TRUE if the function succeeded.
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs network errors. MLMotionRstErr will return the motion engine status to the Stopped state. Returns TRUE if the function succeeded.
See also: MLMotionStatus, MLMotionStop, MLMotionStart
Return Type
BOOL
Example
ST
//Reset and restart motion engine
//Done to restart ethercat after controller error such as
//E30 or E33 that stops network communication
//First have to reset error, then start network again
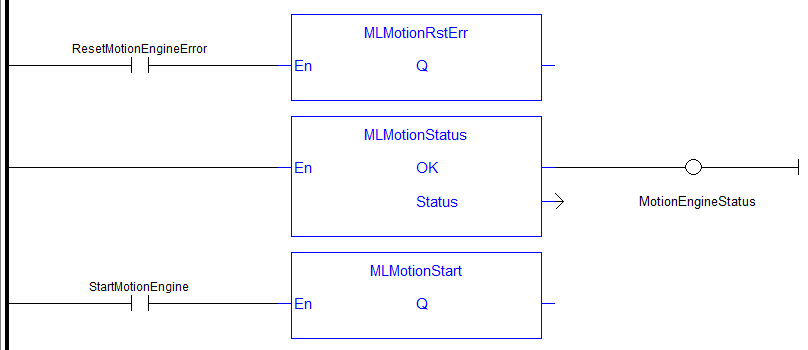
ON ResetMotionEngineError DO
MLMotionRstErr();
END_DO;
MotionEngineStatus:= MLMotionStatus();
ON StartMotionEngine DO
MLMotionStart();
END_DO;
FBD
FFLD
 [Top]
[Top]





