Set Up FSoE Master and an AKD2G with SafeMotion Monitor
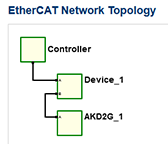
![]() ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs topology consisting of a PCMM (the Controller), a BBH SCU safety master (Device_1), and an AKD2G with SMM Basic safety drive (AKD2G_1).
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs topology consisting of a PCMM (the Controller), a BBH SCU safety master (Device_1), and an AKD2G with SMM Basic safety drive (AKD2G_1).
-
- If using a BBH SCU-1-EC and SafePLC2 software, then the FSoE PDOs can be automatically setup by the KAS IDE
 "Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger and SafePLC2. For more details see Adding or Importing a SafePLC2 Project. For all other third party FSoE Masters, use the procedure described below.
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger and SafePLC2. For more details see Adding or Importing a SafePLC2 Project. For all other third party FSoE Masters, use the procedure described below.
Create Safety Application
First, use the 3rd party Safety PLC![]() "Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events software to create a safety application for the FSoE master. For example, the application will contain a FSoE master and an AKD2Gwith Axis1 and Axis2 as slave devices.
"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events software to create a safety application for the FSoE master. For example, the application will contain a FSoE master and an AKD2Gwith Axis1 and Axis2 as slave devices.
- Set the AKD2G Connection IDs to match the the AKD2G SafeIDs.
- Compile and download the safety application to the FSoE Master.
-
Run the safety application in FSoE Master.
The state will be “Run Intern” and the FSoE state will be “8”.
KAS IDE Project Set Up
To finish the example, a project is created in the KAS IDE using the 2-axis Pipe Network template.
- The IP address of the PCMM controller is set in the project.
-
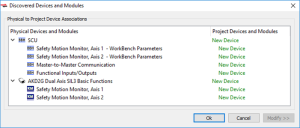
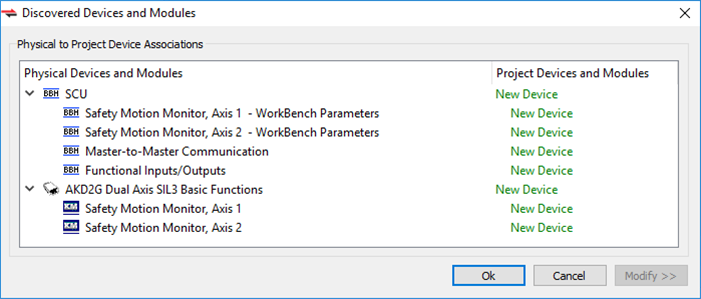
Scan the EtherCAT network to discover the devices.
-
We are prompted to recompile the project due to changes in the EtherCAT topology. We respond "No" because we have not set up the PDO
PDO is a type of protocol frame used in some fieldbuses. A PDO contains one or more object dictionary entries, which define the application data transferred between devices. copy links. -
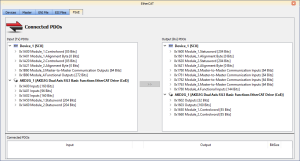
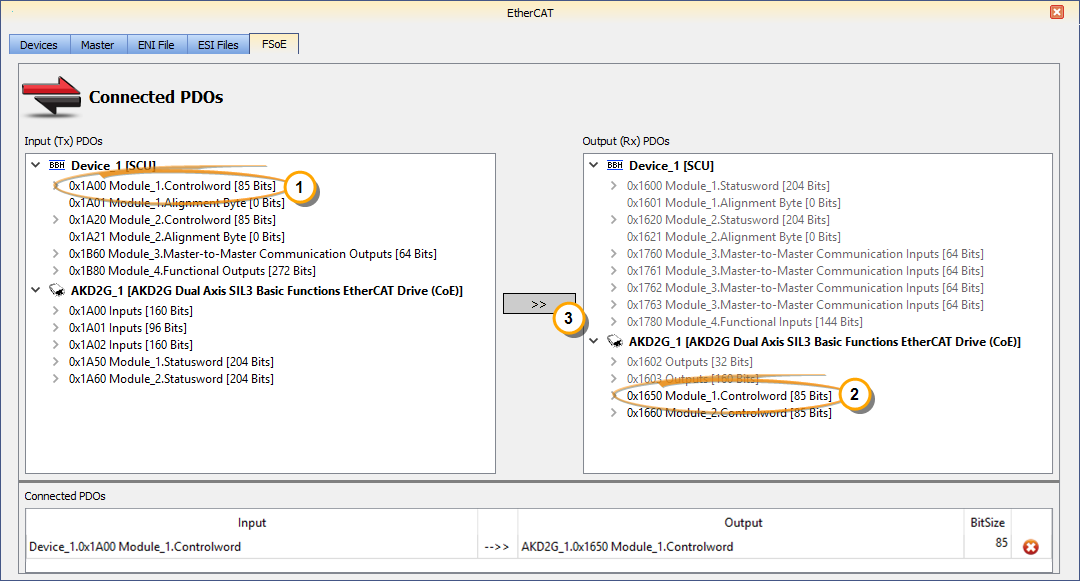
To connect the PDOs we open the FSoE / PDO Connections Tab which is populated with Input and Output PDOs.
-
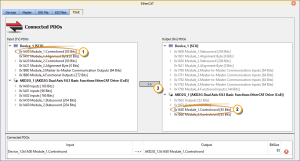
To connect PDOs we choose an input, an output, and click the Connect button. Connections are displayed at the bottom of the tab.
-
We make the following connections:
- Device_1[SCU] PDO 0x1A00 to AKD2G_1 PDO 0x1650
- Device_1 [SCU] PDO 0x1A20 to AKD2G_1 PDO 0x1660
- AKD2G_1 PDO 0x1A50 to Device_1 [SCU] PDO 0x1600
- AKD2G_1 PDO 0X1A60 to Device_1 [SCU] PDO 0x1620
- Compile, download, and run the KAS application.
- The BBH master has changed the state to "Run" and the FSoE state will be "4".
The Safety Master and the Safety Slave are now exchanging data over EtherCAT.
See Also:






