Digitale Eingänge (X7/X8)
Der Servoverstärker bietet 8 digitale Eingänge E/A-Anschluss. Diese können verwendet werden, um vorprogrammierte Funktionen zu initiieren, die im Servoverstärker gespeichert sind. Eine Liste dieser vorprogrammierten Funktionen ist in WorkBench enthalten. Der digitale Eingang 8 ist nicht programmierbar, sondern fest auf die ENABLE-Funktion eingestellt.
Wenn ein Eingang programmiert wurde, muss dies im Servoverstärker gespeichert werden.

|
Je nach der ausgewählten Funktion sind die Eingänge HIGH oder LOW aktiv. Zur Änderung der Eingangsempfindlichkeit können Sie in WorkBench digitale Eingangsfilter setzen. |
Die Eingänge können mit geschalteten +24 V ("Sink") oder geschaltetem GND ("Source") verwendet werden. Siehe folgende Diagramme.
Filter Digital Eingänge
Vier Filteroptionen sind für alle digitalen Eingänge verfügbar. Normalerweise wählt die Formware die korrekten Defaultwerte aus. Sie können die Filtereinstellung jedoch ändern:
|
Ungefiltert |
Schnell |
Default |
Langsam |
|
|---|---|---|---|---|
|
Minimale Eingangs Impulsbreite |
40 ns |
10.24 µs |
163 µs |
2.62 ms |
|
Typischerweise benutzt mit |
RS485 Eingänge, |
schnelle Optokoppler, Digital-In1 und Digital-In2 |
Langsame Optokoppler, Digital-In3 bis Digital-In7 |
|
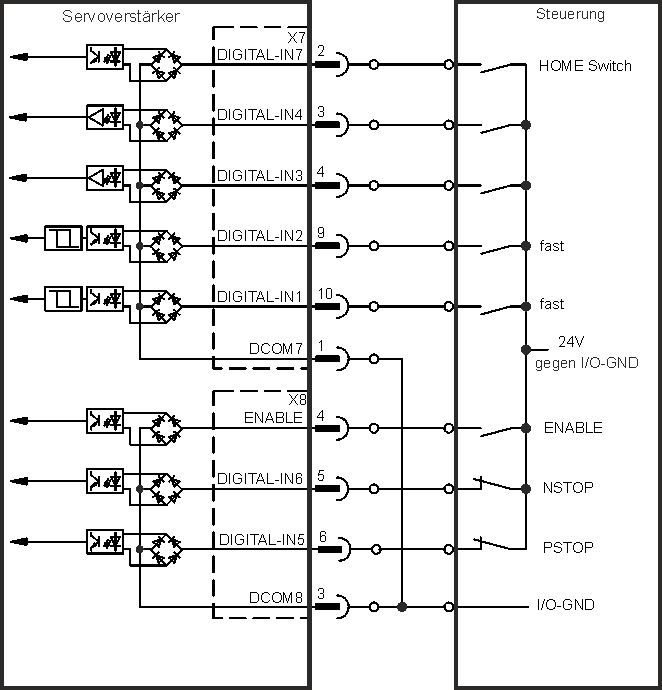
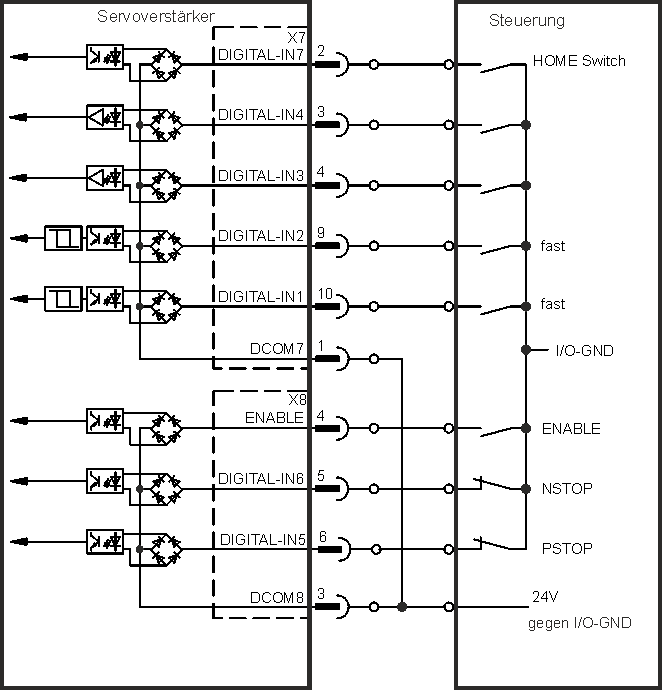
Anschlussbilder X7/X8
X7/X8 Anschlussbild (Anschluss Typ "Sink", Beispiel)
X7/X8 Anschlussbild (Anschluss Typ "Source", Beispiel)
Digitale Eingänge 1 und 2
Diese Eingänge (X7/9 und X7/10) sind besonders schnell und eignen sich daher z. B. für Latch-Funktionen. Sie können auch als 24 V Eingänge für elektronisches Getriebe benutzt werden.
- Potentialfrei, die gemeinsame Referenzleitung ist DCOM7
- Sensoren des Typs Sink oder Source möglich
- High: 3,5...30 V/2...15 mA, Low: -2...+2 V/<15 mA
- Aktualisierungsrate: Firmware liest den Hardware Eingangsstatus alle 250 µs
- Hochgenaues Latchen: die Motor Feedback Position oder die interpolierte Zeit wird innerhalb von 2 µs erkannt, wenn der digitale Eingangsfilter auf 40 ns gesetzt ist.
- Die AKD Capture Engine wird alle 62,5 µs (16 kHz) durch die Firmware abgefragt
- Bei KAS Applikationen (Beispiel: AKD PDMM), wird die Latch Position information im Ethercat PDO aktualisiert. Typische Aktualisierungszeit im KAS Projekt beträgt zwei Ethercat Zyklen (jeder Zykles beträgt 250 µs, 500 µs, 1000 µs oder 2000 µs)
Digitale Eingänge 3 bis 7
Diese Eingänge können mit der Setup-Software programmiert werden. Standardmäßig sind alle Eingänge abgeschaltet. Weitere Informationen finden Sie in der Setup-Software.
Wählen Sie die gewünschte Funktion in WorkBench.
- Potentialfrei, gemeinsame Referenzleitung ist DCOM7 bzw. DCOM8
- Sensoren des Typs Sink oder Source möglich
- High: 3,5...30 V/2...8 mA, Low: -2...+2 V/<8 mA
- Aktualisierungsrate: Firmware liest den Hardware Eingangsstatus alle 250 µs
- Die Aktualisierungsrate der Tasks für die verschiedenen Eingangsfunktionen finden Sie in DIN1.MODE TO DIN7.MODE
Digitaler Eingang 8 (ENABLE)
Der digitale Eingang 8 (Klemme X8/4) ist auf die Enable-Funktion eingestellt.
- Potentialfrei, die gemeinsame Referenzleitung ist DCOM8
- Verdrahtung des Typs Sink oder Source möglich
- High: 3,5...30 V/2...8 mA, Low: -2...+2 V/<8 mA
- Aktualisierungsrate: direkte Verbindung zur Hardware (FPGA)
|
|
Der Hardware Enable Eingang und das Software Enable Signal (über Feldbus oder WorkBench) sind seriell verknüpft, das bedeutet, der Hardware Enable muss immer verdrahtet werden. |
Die Endstufe des Verstärkers wird freigegeben, indem das ENABLE-Signal angewendet wird (Klemme X8/4, aktiv high). Die Freigabe ist nur möglich, wenn am STO Eingang ein 24 V-Signal anliegt. Im deaktivierten Status (Low Signal) erzeugt der angeschlossene Motor kein Drehmoment.
Eine Software-Freigabe durch die Setup-Software ist ebenfalls erforderlich (UND-Verknüpfung). Die Software Freigabe in WorkBench kann auf permanent gesetzt werden.







