Das
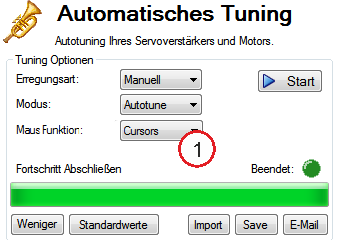
Um die erweiterten Modi des PST zu nutzen, klicken Sie auf die Schaltfläche Mehr. Es werden zusätzlichen Informationen für das erweiterte Autotuning angezeigt:
Tuning von Systemen mit Niederfrequenzresonanzen
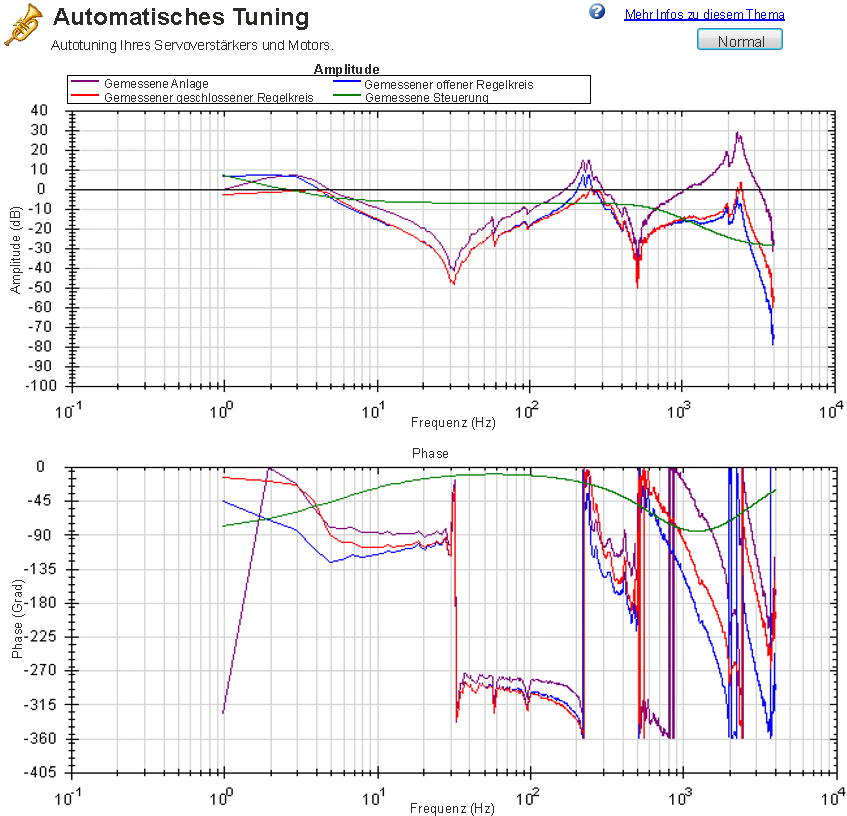
Systeme mit Niederfrequenzresonanzen stellen eine Herausforderung dar, da eine Messung von Niederfrequenzdaten schwierig ist. Auch wenn das PST diese Systeme einstellen kann, sollten Sie mit einer geringeren Systemleistung rechnen. Falls Ihr System über eine erste Anti-Resonanz von 30 Hz verfügt (nachstehend abgebildet), können Sie eine Bandbreite von 15 Hz des geschlossenen Regelkreises erwarten (die halbe Frequenz der ersten Anti-Resonanz).
Um eine genaue Messung der Niederfrequenzresonanzen sicherzustellen, muss außerdem die Auflösung der schnellen Fourier-Transformation (Fast Fourier Transform, FFT) fein genug eingestellt werden. Ein guter Ausgangspunkt ist eine FFT-Auflösung von 1/10 der Frequenz des niedrigsten Antiknotens. In dem Beispiel oben liegt eine Anti-Resonanz von 30 Hz an, daher sollte die Auflösung etwa 3 Hz FFT betragen. Das PST kann mit der Resonanz funktionieren, wenn diese genau gemessen wird, wie unten gezeigt. Zur Einstellung der FFT-Auflösung legen Sie nach Bedarf FFT-Punkte auf der Registerkarte Aufzeichnungsoptionen fest.
Tuning von Systemen mit Hochfrequenzresonanzen
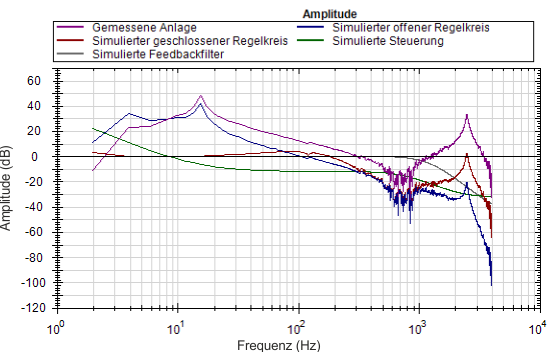
Einige Systeme weisen Resonanzen bei sehr hohen Frequenzen auf (höher als 1 kHz). Bei derartig hohen Frequenzen kann die Einstellung schwierig werden, da diese Systeme sehr oft wahrnehmbare, hohe Rauschpegel erzeugen. Ein Beispiel für eine starke Resonanz finden Sie nachstehend. Dieses Beispiel zeigt ein Stahlschwungrad, das an einem
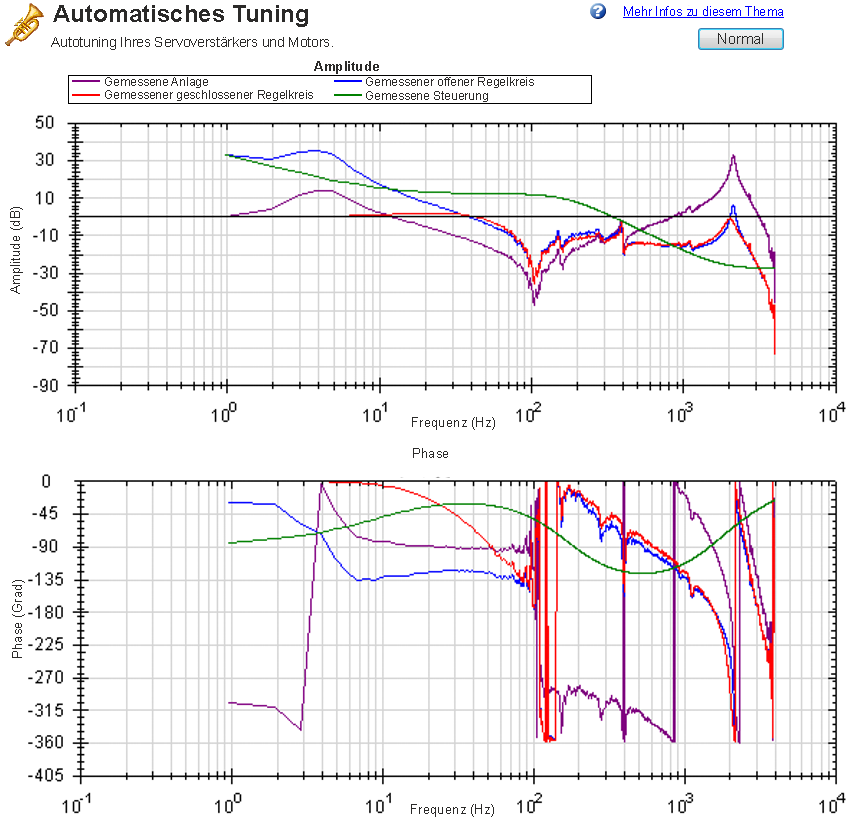
Eine Möglichkeit zur Lösung dieses Problems ist die Verwendung eines Tiefpass-Filters im Rückführungspfad. Um diesen Filter zu verwenden, klicken Sie einfach auf die Option Tiefpass-Suche aktivieren im PST. Dies ist das Standardverfahren.
Tuning von Systemen mit verrauschter Frequenzantwort
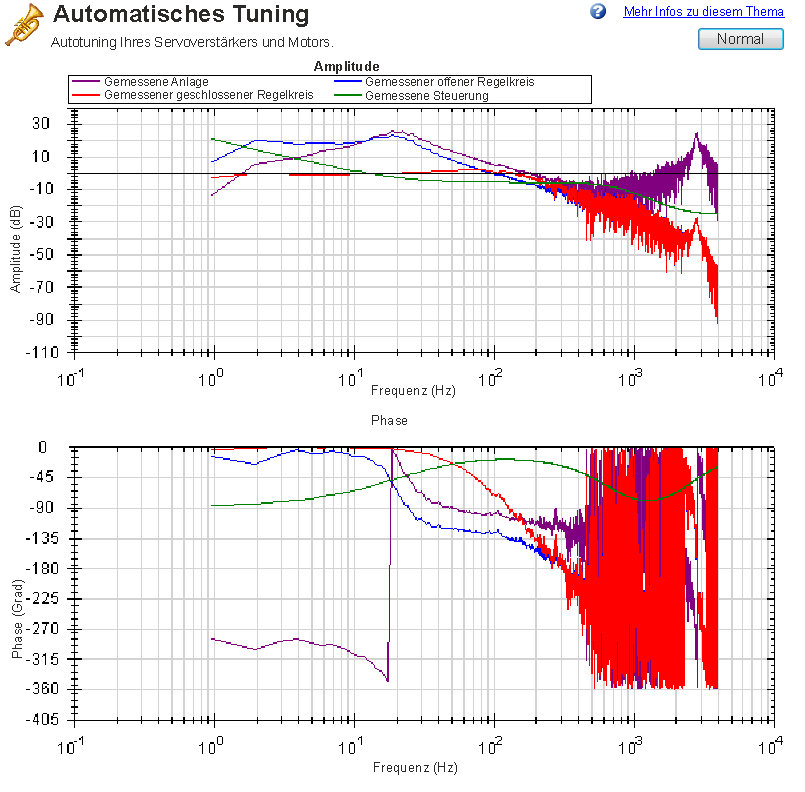
Bei Verwendung eines Motors mit geringauflösenden Inkrementalgeber oder Resolver kann die Hochfrequenzantwort Rauschen enthalten. Die nachstehende Abbildung zeigt einen Bode-Plot, der nach dem Autotuning eines Inkrementalgebers mit 8.192 Schritten pro Umdrehung erzeugt wurde.
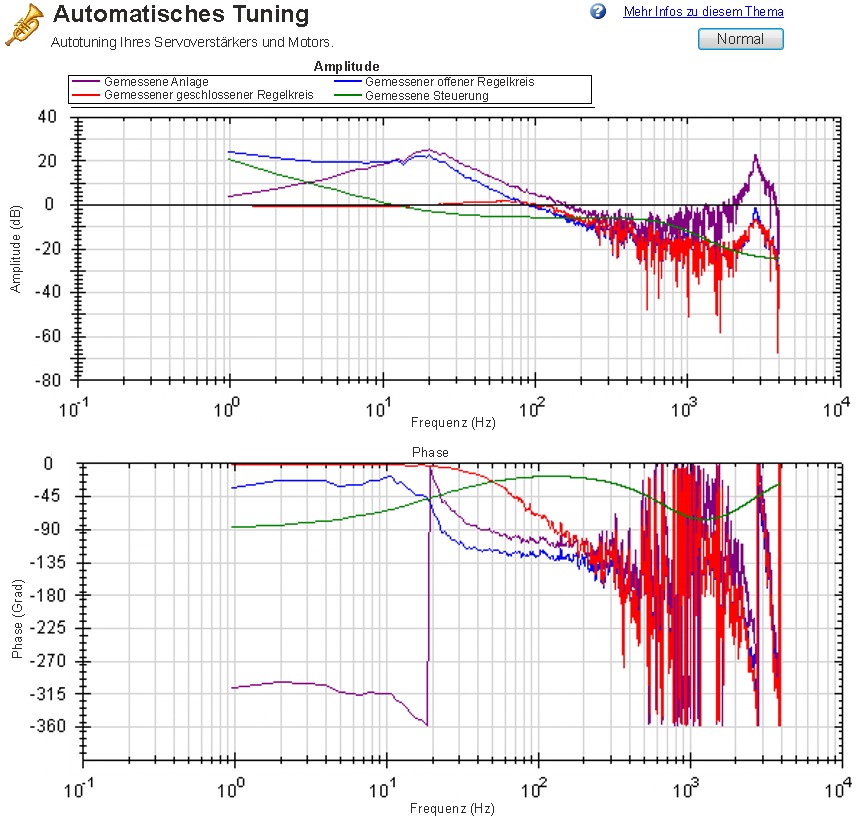
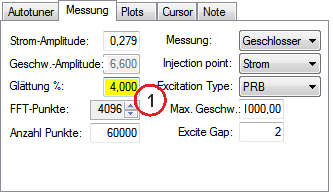
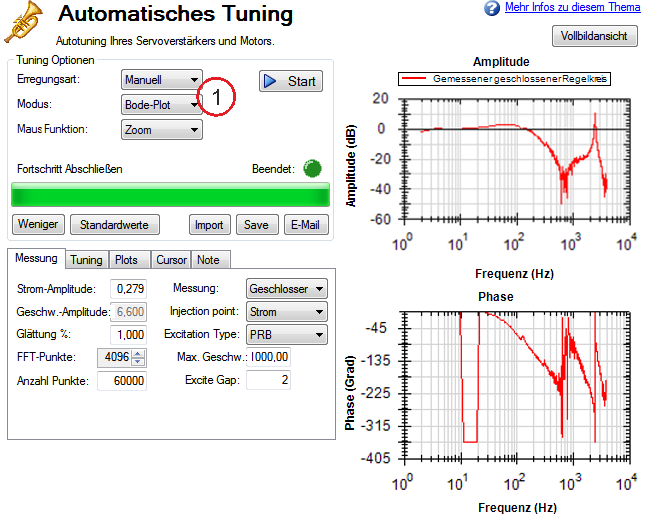
Damit der Bode-Plot besser lesbar ist, erhöhen Sie den Glättungsfaktor (1) in den erweiterten Messoptionen.
Optionen.
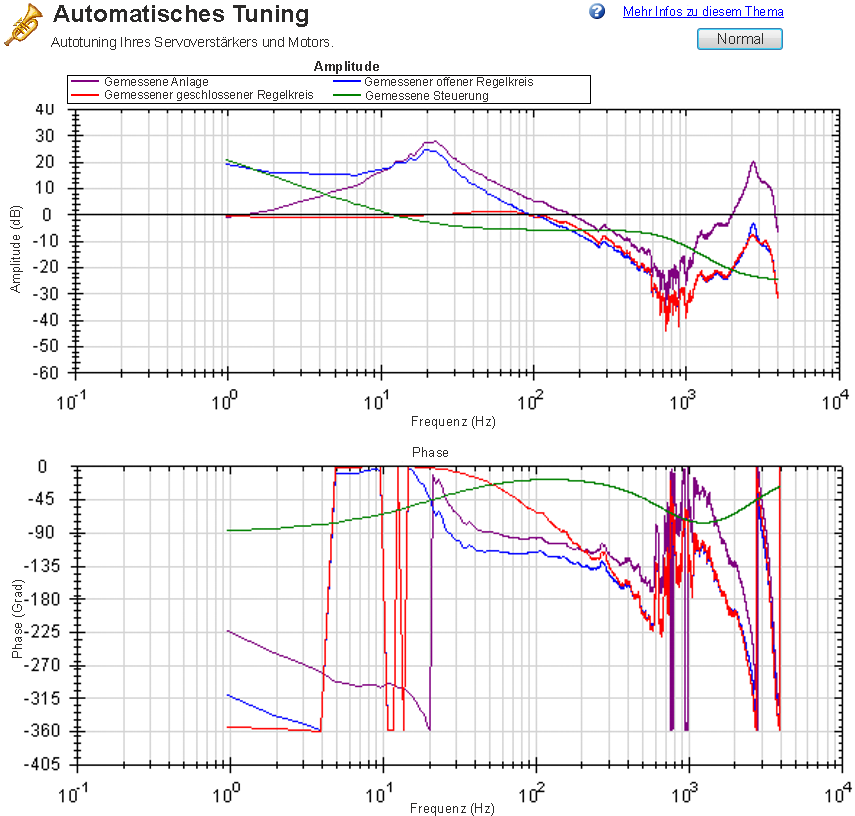
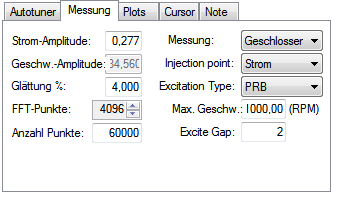
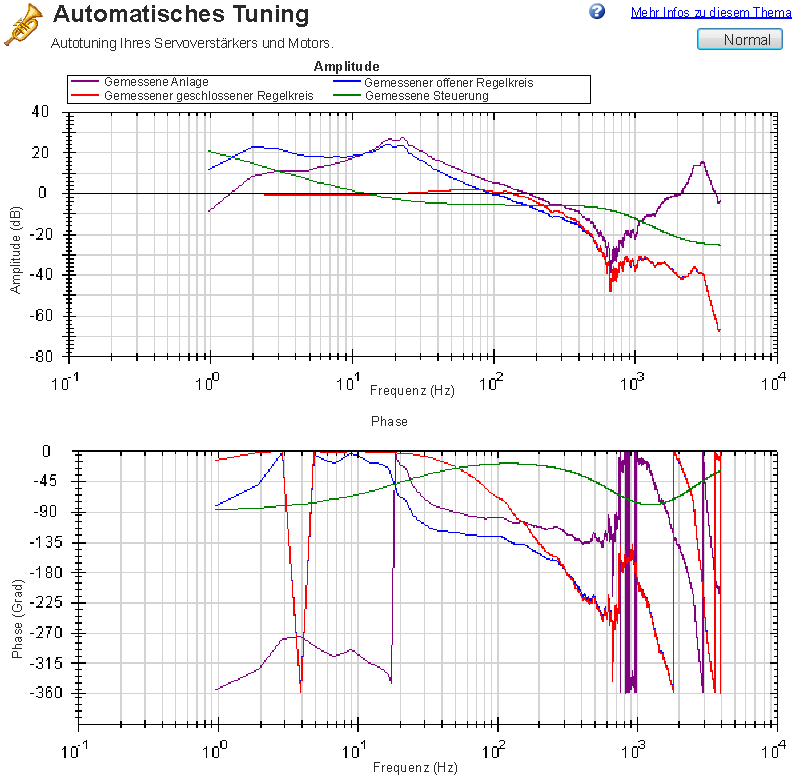
Nach der Erhöhung der prozentualen Glättung sind die Spuren des Bode-Plots sauberer dargestellt und besser zu lesen.
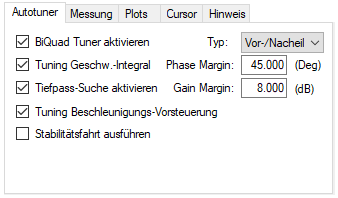
Wenn Sie auf Mehr im Fenster „PST“ klicken, werden die folgenden Optionen angezeigt:
BiQuad 1 Tuner aktivieren
Markieren Sie dieses Kästchen, um den ersten Anti-Resonanzfilter im Vorwärtspfad (AR1) zu verwenden. Mit Hilfe des Kästchens Typ rechts von BiQuad 1 Tuner aktivieren können Sie den zu verwendenden Filtertyp festlegen.
BiQuad 2 Tuner aktivieren
Markieren Sie dieses Kästchen, um den zweiten Anti-Resonanzfilter im Vorwärtspfad (AR2) zu verwenden. Mit Hilfe des Kästchens Typ rechts von BiQuad 2 Tuner aktivieren können Sie den zu verwendenden Filtertyp festlegen. Wenn Sie diese Option aktivieren, arbeitet Ihr Computer während dieses Vorgangs möglicherweise deutlich langsamer.
BiQuad-Typ
Für BiQuad 1 und 2 können Sie den zu implementierenden Filtertyp festlegen. Folgende vier Optionen stehen zur Verfügung:
Tuning der Beschleunigungs-Vorsteuerung
Über dieses Kästchen wird der Tuner für die Verstärkungsvorsteuerung der Beschleunigung ein- bzw. ausgeschaltet. Wenn das Kästchen markiert ist, misst das PST die mit der Motorwelle verbundene Trägheit, berechnet anhand dieses Messwerts die richtige Vorsteuerung der Beschleunigung und lädt diese in den Servoverstärker
Stabilitätsfahrt ausführen
Wenn dieses Kontrollkästchen markiert wird, lässt das PST nach Abschluss des automatischen Tunings eine kurze Bewegung im Uhrzeigersinn und wieder zurück ausführen und überwacht dabei die Motorparameter, um festzustellen, ob die Einstellung stabil ist. Falls eine Instabilität erkannt wird, erzeugt der Servoverstärker den Fehler
Phasen- und Amplitudenreserve
Das PST stellt immer sicher, dass das Tuning die Stabilitätskriterien erfüllt, die in Einheiten für die Phasenreserve (in Grad) und die Amplitudenreserve (in dB) festgelegt werden kann. Das PST verwendet zwar Standardwerte für Phasen- und Amplitudenreserve, Sie können jedoch diese Werte anpassen, um eine höhere Stabilität zu gewährleisten. Andererseits können Sie geringere Amplituden- und Phasenreserven verwenden, damit das PST aggressiver reagiert.
Tuning Geschwindigkeitsintegral
Markieren Sie dieses Kästchen, um
Tiefpass-Suche aktivieren
Markieren Sie dieses Kästchen, um einen Tiefpass-Filter der vierten Ordnung im Rückführungspfad einzustellen (AR 3 und 4). Wenn dieses Kästchen nicht markiert ist, ändert das PST die Anti-Resonanzfilter im Rückführungspfad nicht.
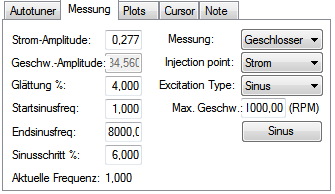
Der PST-Bildschirm bietet zudem Optionen für Messungen:
Strom-Amplitude
Mit diesem Feld wird die Amplitude des Stroms eingestellt, mit dem das System während einer Stromeinspeisung erregt wird. Diese Amplitude gilt für alle Erregungsarten, wenn der Einspeisepunkt auf Strom gesetzt ist. Das Feld Strom-Amplitude ist deaktiviert, wenn der Einspeisepunkt auf einen anderen Wert gesetzt wird.
Geschwindigkeits-Amplitude
Mit diesem Feld wird die Amplitude der Geschwindigkeit eingestellt, mit das System im Geschwindigkeits-Einspeisemodus erregt wird. Diese Amplitude gilt für alle Erregungsarten, wenn der Einspeisepunkt auf Geschwindigkeit gesetzt ist. Das Feld Geschwindigkeits-Amplitude ist deaktiviert, wenn der Einspeisepunkt auf einen anderen Wert gesetzt wird.
Glättung %
Bei diesem Wert wird ein dynamischer Mittelwert-Glättungsfilter auf das während des Autotunings erfasste Frequenzansprechverhalten angewandt. Dieser Vorgang reduziert das Rauschen in der Frequenzantwort, das bei zu kurzen Messungen des Frequenzverhaltens, bei niedrigauflösenden Gebern, bei Frequenzantworten mit kleiner Amplitude oder aus anderen Gründen auftreten kann. Der Glättungsfilter wird mit jeder Frequenz des FFT-Plots wiederholt. Für jede Frequenz werden die Größen für alle Frequenzen im Bereich Glättung % gemittelt.
Wenn Sie zum Beispiel einen Bode-Plot mit 5 % bei 100 Hz glätten, werden die Werte aller Frequenzen zwischen 95 Hz und 105 Hz gemittelt. Wenn der Filter 1000 Hz erreicht, mittelt er alle Werte zwischen 950 Hz und 1050 Hz.
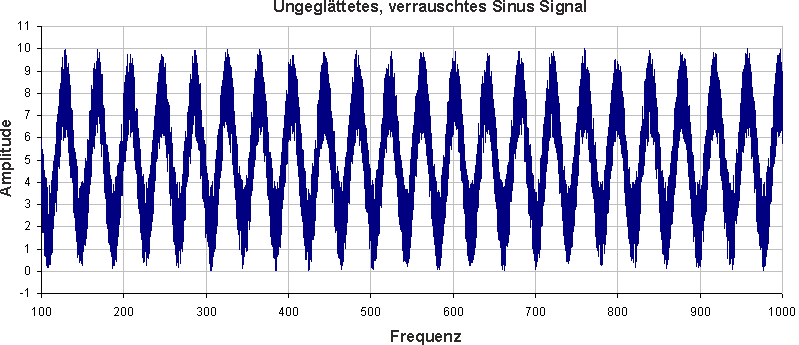
Als Beispiel nehmen wir ein verrauschtes Sinuswellensignal und einen Glättungsfaktor von 5 %. Nachstehend ist ein verrauschtes Signal mit einem Bereich zwischen 100 Hz und 1000 Hz dargestellt.
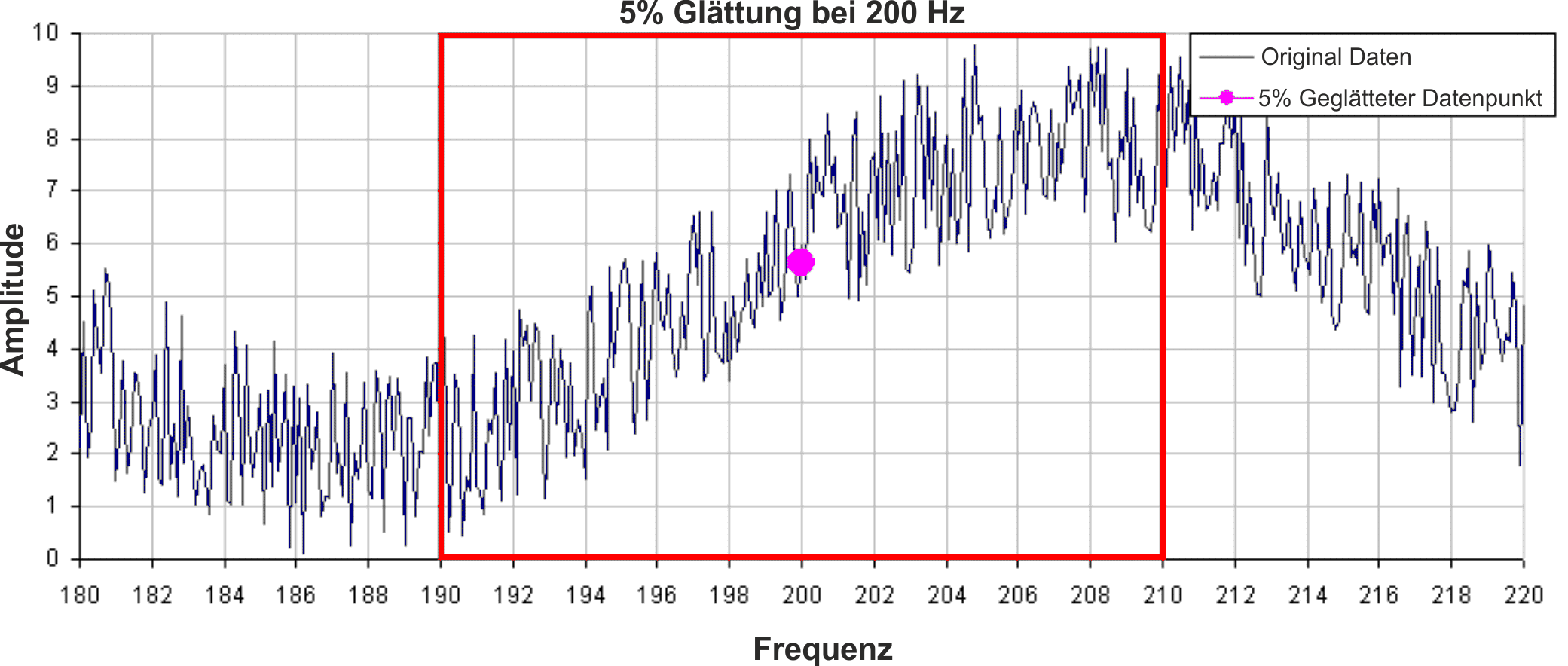
In diesem Beispiel zeigt die Untersuchung der Auswirkungen des Glättungsfilters auf einen Punkt, wie der Glättungsfilter in einem vollständigen Plot wirkt. Wenn Sie auf 200 Hz +/-5 % vergrößern, erhalten Sie einen Bereich von 190 Hz – 210 Hz. Der Glättungsfilter mittelt diesen Wertebereich und legt den Durchschnitt bei 200 Hz fest. Die nachstehende Abbildung zeigt die um 200 Hz gezoomten Daten und den gemittelten Wert aller Frequenzen +/-5 %.(Das rote Feld verdeutlicht den geglätteten Frequenzbereich.)
Im PST führt der Glättungsfilter diese Analyse für jeden Frequenzpunkt auf dem Bode-Plot durch. Falls die Daten ein zu starkes Rauschen enthalten, können Sie den Prozentsatz der Glättung erhöhen, um das Rauschen auszublenden und das zugrunde liegende Datenmuster zu erkennen. Ein Vergleich eines Systems mit 0,1 % Glättung und mit 8 % Glättung ist nachfolgend dargestellt.
0,1 % Glättung
8 % Glättung
Hinweis: Die Glättung mindert die Resonanzspitzen. Wenn die Glättung zu stark ist, kann eine Resonanz vollständig ausgeblendet werden. Wenn das PST eine Resonanz aufgrund einer hohen Glättung nicht erkennen kann, kann das System instabil werden.
Messung
Mit diesem Feld wird der während einer Messung verwendete Messtyp festgelegt. Das PST funktioniert nur, wenn der Messtyp Anlage gewählt ist, in anderen Messbetriebsarten funktioniert es nicht.
Einspeisepunkt
Mit dem Feld Einspeisepunkt wird die Erregungsquelle festgelegt, die während des Autotunings verwendet wird. Der Modus Strom nutzt eine Drehmomentstörung am Drehmomentausgang. Während der Messung der Stromeinspeisepunkte nutzt die Erregung den Wert für Strom-Amplitude zur Festlegung der Erregungsstärke.
Der Modus Geschwindigkeit verwendet einen Geschwindigkeitsbefehl zur Erregung des Systems. Während der Messung der Geschwindigkeits-Einspeisepunkte nutzt die Erregung den Wert für Geschwindigkeits-Amplitude zur Festlegung der Erregungsgröße.
Erregungstyp
Im Feld Erregungstyp können Sie den Erregungstyp auswählen. Die verfügbaren Optionen lauten: Rauschen, PRB-Erregung und Sinus.
Rauschen nutzt ein Pseudostreu-Rauschsignal zur Erregung des Systems Das Signal variiert zwischen positiver/negativer Strom- oder Geschwindigkeits-Amplitude (je nach Einspeisepunkt). Es enthält ein Frequenzspektrum, das von einem unteren Grenzwert gleich:
16.000/(Erregungsabstand * Anzahl Punkte) Hz
bis zu einem oberen Grenzwert reicht:
(16.000/Erregungsabstand) Hz .
Die Dichte des Frequenzspektrums basiert auf Abweichungen in der Amplitude des Rauschsignals.
PRB nutzt ein binäres, zufälliges Signal zur Erregung des Systems. Das Signal ist entweder eine positive oder negative Strom- bzw. eine Geschwindigkeits-Amplitude (je nach Zuführpunkt). Es enthält ein Frequenzspektrum, das von einem unteren Grenzwert gleich oder größer als:
(16.000/(2^
bis zu einem oberen Grenzwert reicht:
(16.000/Erregungsabstand) Hz .
Für die Option Sinus müssen Sie die Start- und Endfrequenz sowie die Schrittgröße der Frequenz festlegen. Für die Messung der Sinuswelle wird erheblich mehr Zeit benötigt als für eine Rausch- oder PRB-Messung, allerdings ist sie oft sauberer. Gehen Sie bei der Wahl einer Schrittgröße vorsichtig vor: Bei einer zu hohen Schrittgröße werden wichtige Resonanzen eventuell nicht erfasst, während eine zu geringe Schrittgröße die Messzeit erhöht.
FFT-Punkte
Das Feld FFT-Punkte wird nur bei Rausch- und PRB-Messungen angezeigt und gilt ausschließlich dafür. FFT-Punkte legt die Auflösung der FFT-Messungen fest. Die Frequenzauflösung entspricht
16.000/(Erregungsabstand * FFT-Punkte).
Durch Erhöhung der FFT-Punkte Anzahl wird die Auflösung feiner, allerdings erhöht sich das Rauschen in der Frequenzantwort.
Erregungsabstand
Das Feld Erregungsabstand wird nur bei Rausch- und PRB-Messungen angezeigt und gilt ausschließlich dafür. Mit dieser Option wird festgelegt, wie häufig die Testerregung aktualisiert wird. Der Mindestwert für den Erregungsabstand beträgt 1. Dieser Wert wird normalerweise für Autotuning auf 2 gesetzt. Die Erregungsrate beträgt 16.000/Abstand. Sie können die Hochfrequenzerregung durch Erhöhen des Werts für Erregungsabstand begrenzen.
Anzahl Punkte
Das Feld Anzahl Punkte wird nur bei Rausch- und PRB-Messungen angezeigt und gilt ausschließlich dafür. Mit dieser Option wird die Aufzeichnungslänge beim Messen der Frequenzantwort des Systems festgelegt. Die Messlänge beträgt:
Anzahl Punkte * Erregungsabstand/16.000 Sekunden.
Max. Geschw.
Im Feld Max.Geschw.legt der Benutzer die maximale Drehzahl des Motors während der Erregung fest. Dieses Feld ist bei normalem Betrieb des Servoverstärkers unwirksam und wird nur während der Erregerphasen des PST angezeigt. Dieser Wert wird angewandt, sobald das PST startet. Wenn es beendet ist, wird der vorherige Schwellwert für Überdrehzahl
Wenn das Feld Erregungstyp auf Sinus gesetzt ist, stehen andere Konfigurationsoptionen zu Verfügung.
Startsinusfreq.: Die Prüfung der Sinuswelle beginnt bei dieser Frequenz. Die Startfrequenz muss größer als Null und kleiner als die Sinusendfrequenz sein. Startsinusfreq.wird nur bei Sinusmessungen angezeigt und gilt ausschließlich hierfür.
Endsinusfreq.: Die Prüfung der Sinuswelle endet bei dieser Frequenz. Die Endfrequenz muss niedriger als oder gleich 8.000 und höher als die Startsinusfrequenz sein. Endsinusfreq.wird nur bei Sinusmessungen angezeigt und gilt ausschließlich hierfür.
Sinusschritt %: In diesem Feld wird die Sinusschrittgröße festgelegt. Die Sinuswelle ist diskret, nicht kontinuierlich. Jede Frequenz ist ein Vielfaches der vorherigen. Wenn zum Beispiel die erste Frequenz 1 und die Schrittgröße 6 % beträgt, wäre die zweite Frequenz 1 * 1,06 = 1,06 H, die dritte Frequenz wäre 1,06 * 1,06 = 1,12 Hz. Diese Multiplikation wird fortgesetzt, bis die aktuelle Frequenz den Wert für Endsinusfrequenz überschreitet. Sinusschritt % wird nur bei Sinusmessungen angezeigt und gilt ausschließlich hierfür.
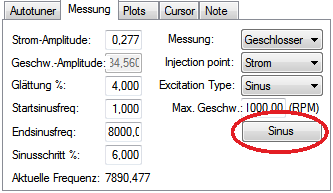
Aktuelle Frequenz: In diesem Feld wird die aktuelle Frequenz der Sinuswelle angezeigt. Aktuelle Frequenz wird nur bei Sinusmessungen angezeigt und gilt ausschließlich hierfür.
Sinus einschalten: Mit dieser Option kann der Benutzer das System mit einer einzelnen Sinusfrequenz anregen. Nach dem Klicken dieser Schaltfläche werden alle nicht zutreffenden Felder ausgeblendet. Sie können die Sinusfrequenz und -amplitude ändern. Um die Sinuserregung zu stoppen, klicken Sie auf Sinus abschalten. Sinus einschalten wird nur bei Sinusmessungen angezeigt und gilt ausschließlich dafür.
Bei Verwendung der Sinuserregung mit geringauflösenden Encodern kann eine Hochfrequenzerregung eine Encoder-Bewegung von weniger als einem Schritt auslösen. In diesem Fall wird für diese Erregungsfrequenz keine Bewegung des Motors beobachtet. Folglich wird kein Datenpunkt für diese Frequenz geplottet, da die Berechnung 0 dB für Verstärkung und -unendlich für Phase ergibt.
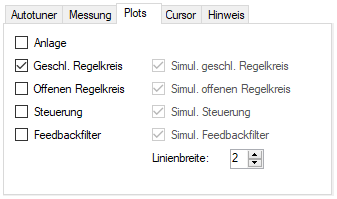
Per Vorgabe ist nur der Plot für den gemessenen geschlossenen Regelkreis ausgewählt. Sie können festlegen, welches Ansprechverhalten im Bode-Plot angezeigt wird.Markieren Sie dazu die angezeigten Kontrollkästchen Anlage plotten, Geschl.Regelkreis plotten, Offenen Regelkreis plotten, Steuerung plotten und Kohärenz plotten bzw. heben Sie die jeweilige Markierung auf. Die Optionen Simul.geschl.Regelkreis, Simul.offenen Regelkreis, Simul.Steuerung und Simul.Feedbackfilter sind nur im Bode-Plot-Modus verfügbar, nicht jedoch im PST-Modus.
Kohärenz
Die Option „Kohärenz“ist nur für Rausch- und PRB-Messungen, nicht aber für Sinuserregermessungen verfügbar.
Kohärenz ist ein Hinweis auf die Genauigkeit der Daten. Beispielsweise bedeutet 0 dB (1 in Linearzahlen), dass eine perfekte Kohärenz vorliegt. Eine andere Möglichkeit zur Verdeutlichung dieses Konzept ist: Für eine Eingangseinheit erhalten Sie eine Ausgangseinheit. Kohärenz wird anhand folgender Formel berechnet:

Dabei bedeuten:
Pxx = spektrale Leistungsdichte des Eingangssignals
Pyy = spektrale Leistungsdichte des Ausgangssignals
Pxy = Kreuzleistungsdichte des Ein- und Ausgangs
* bezeichnet eine konjugierte Zahl
Cursor
Mit der Aktivierung von Cursorn können Sie Punkte im Bode-Plot aufzeichnen, die von besonderem Interesse sind, und eine Tabelle der Referenzpunkte in der Übersichtstabelle erzeugen. Auswahl von Cursor im Auswahlfeld Maus Funktion (1) startet die Cursorfunktion.
Zum Verschieben des Cursor bewegen Sie den Mauszeiger entweder im Amplituden- (1) oder im Phasenplot (2) auf den Cursor, klicken und halten die linke Maustaste. Ziehen Sie dann den Cursor in die neue Position.Beachten Sie, wie sich beim Ziehen der Maus Frequenz, Verstärkung und Phase im Übersichtsfenster (3) ändern.
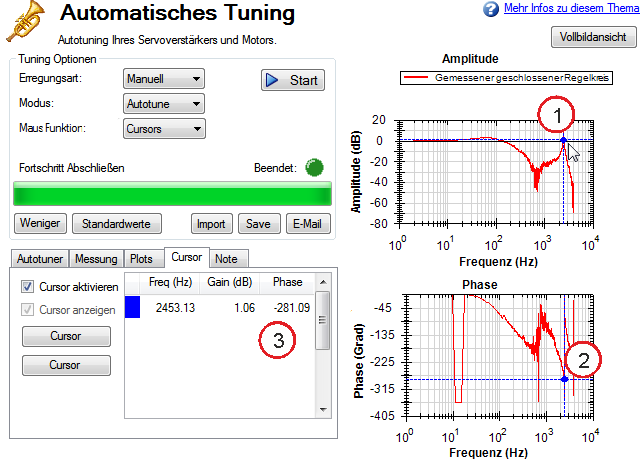
Um weitere Cursor hinzuzufügen, klicken Sie auf Cursor hinzufügen.Sie können bis zu 10 Cursor in den Bode-Plot einfügen. Bei der Auswahl eines Cursors wird der Cursor verwendet, der der Maus am nächsten ist. Beim Ziehen springt der Cursor zur nächstgelegenen Plot-Spur.
Wenn Cursor aktiviert sind, sind die Zoomfunktionen im Diagramm deaktiviert. Umschalten der Maus Funktion auf Zoom reaktiviert die Zoom Funktion.
Die gepunkteten Fadenkreuzlinien werden nur vom ausgewählten, aktiven Cursor gezogen.Um alle Cursor am Bildschirm unter Beibehaltung ihrer Position auszublenden, heben Sie die Markierung von Cursor anzeigen auf.Um alle Cursor zurückzusetzen, klicken Sie auf Cursor zurücksetzen.
Hinweis: Wenn eine CSV-Datei nach dem Setzen eines Cursors im Bode-Plot gespeichert oder per E-Mail versendet wird, enthalten die CSV-Rohdaten eine Cursor-Übersicht.
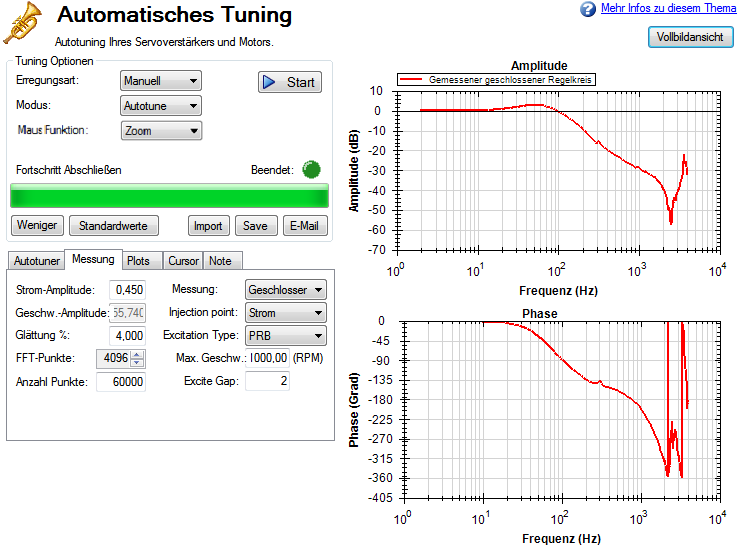
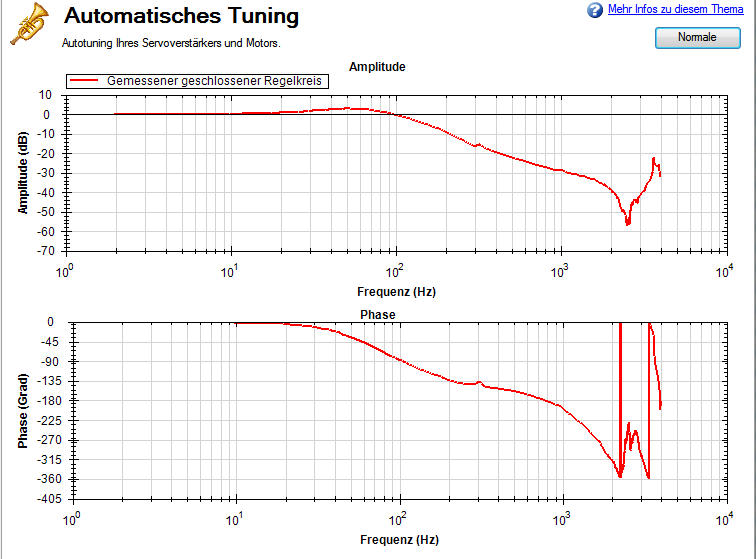
In der PST-Ansicht können Sie den Bode-Plot mit Hilfe der Schaltfläche Vollbild und Normalansicht (1) oben rechts im Fenster mehr oder weniger detailliert darstellen. Bei der Vollbildanzeige des Bode-Plots sind die PST-Einstellungen durch den Bode-Plot verdeckt. Um die PST-Einstellungen zugänglich zu machen, klicken Sie auf die Schaltfläche Normalansicht oben rechts im Fenster.
Normalansicht einer einfachen Messung
Vollbilddarstellung einer einfachen Messung
Lesen und Verstehen des Bode-Plots
Sie können das Tuning durchführen, ohne Bode Plots interpretieren zu können. Das Verständnis von Bode Plots hilft allerdings beim Benutzen des erweiterten Tunings, das detailliert in der Dokumentation
Prinzipiell werden vier Spuren im Bode-Plot angezeigt:
Das nachstehende Diagramm des Geschwindigkeitsregelkreises im Servoverstärker erläutert das Frequenzverhalten, das jede dieser Spuren darstellt:
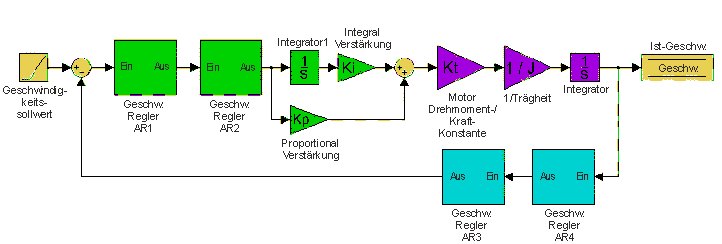
Diese Blöcke können in den Abschnitten „Steuerung“, „Anlage“ und „Rückführung“ in Gruppen zusammengefasst werden.
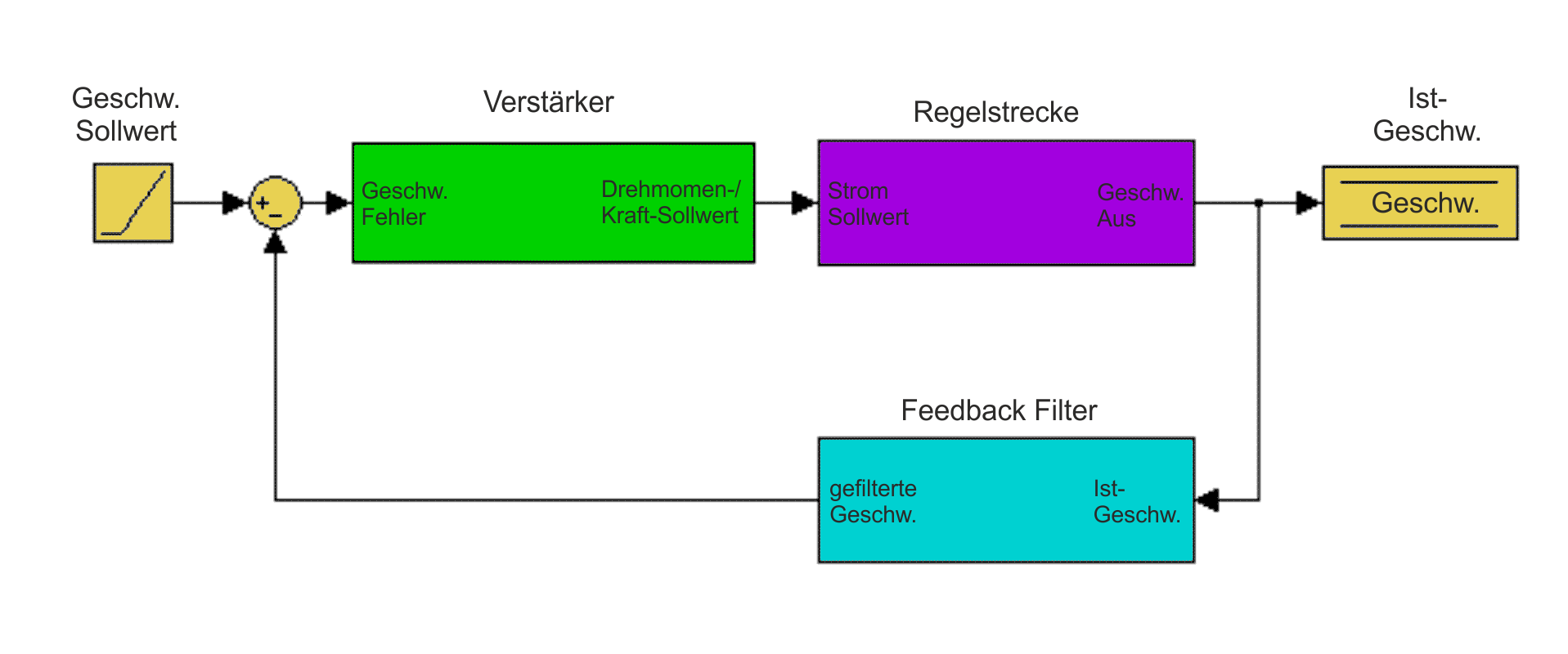
Alle grünen Blöcke wurden zusammengefasst, um die Steuerung [C] zu erzeugen. Die Steuerung ist der Teil des Regelkreises, der die gesamten Tuning-Einstellungen für Geschwindigkeits- und Positionsregelkreise, einschließlich der Vorsteuerungen enthält.
Alle lilafarbenen Blöcke wurden zur Anlage [P] zusammengefasst. „Anlage“ stellt die mechanischen und elektrischen Eigenschaften des Motors, des Servoverstärkers und anderer, am
Die beiden Rückführungsfilter wurden in einem Block zusammengefasst. Dieser Wert wird nie direkt gemessen, trägt allerdings zum Frequenzverhalten von „Offener Regelkreis“ [G] und „Geschlossener Regelkreis“ [T] bei.
Die Definition des Frequenzverhaltens für Offenen Regelkreis [G] lautet:
Offener Regelkreis = Steuerung x Anlage x Feedbackfilter
Die Definition des Frequenzverhaltens für Geschlossenen Regelkreis [T] lautet:

Das nachstehende Diagramm enthält Messpunkte (Eingang und Ausgang) für jedes dieser Frequenzverhalten. Die Eingangs- und Ausgangsmarker sind mit der Farbe codiert, in der Sie im PST dargestellt werden:
Erregung durch Strom:
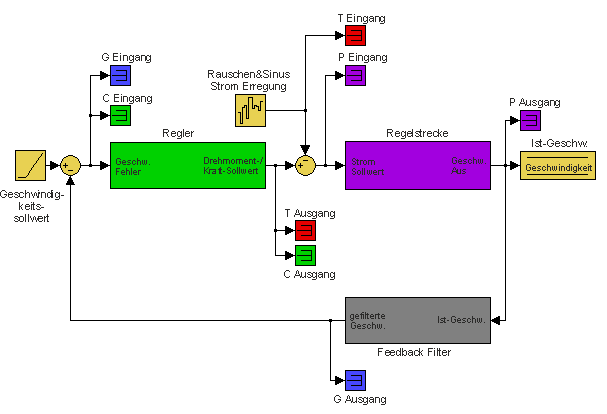
Erregung durch Geschwindigkeit:
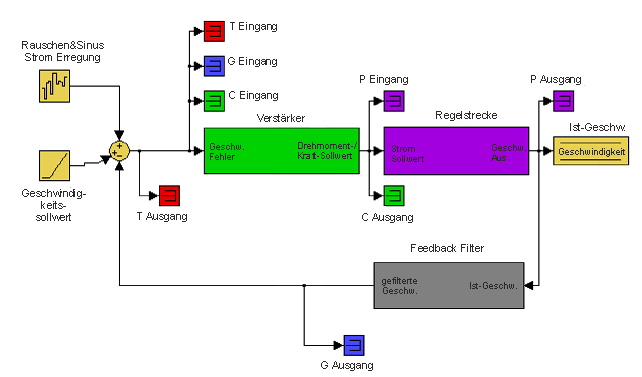
Die daraus resultierenden Plots stellen das Frequenzverhalten des Eingangs/Ausgangs für jede Messung dar.
Weitere Informationen zu diesen Spuren finden Sie in der Dokumentation
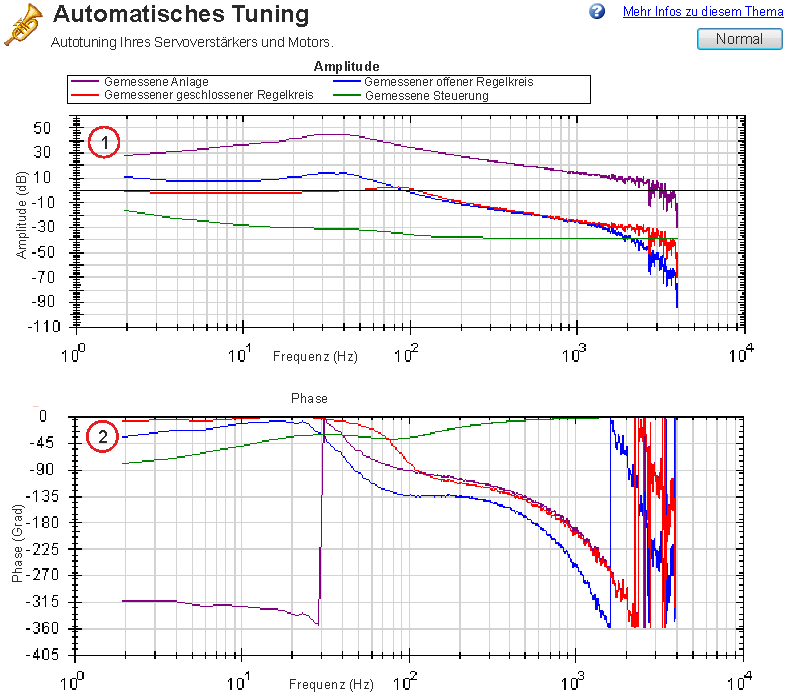
Der nachstehende Bode-Plot zeigt einen Motor ohne
Der untere Plot ist der Phasen-Plot (2). Dieser Plot wird zusammen mit dem Größen-Plot zur Bestimmung der Stabilität eingesetzt und hilft Ihnen, die Art der Latenzen im Servosystem zu erkennen oder festzustellen, ob Latenzen durch die Filter im Geschwindigkeitsregelkreis induziert wurden.
Verwendung des automatischen Tuning zur manuellen Einstellung von Systemen
Häufig müssen Sie einen Regelkreis manuell einstellen, um eine optimale Maschinenleistung zu erzielen. Sie können die Schnittstelle für automatisches Tuning (PST) verwenden, um den Regelkreis auf optimale Leistung einzustellen. Eine leistungsstarke Funktion der Schnittstelle für manuelles Tuning ist die Möglichkeit, das Frequenzansprechen vor der Messung zu simulieren. Mit dieser Funktionen können Sie eine Basismessung vornehmen, die Motor deaktivieren, die Tuning-Parameter einstellen und das Frequenzansprechen des Motors simulieren, ohne eine neue Messung vorzunehmen. Dieser Prozess spart Zeit und schützt die Ausstattung vor gefährlichen Schwingungen.
Setzen Sie zum Start des manuellen Tuning-Prozesses das PST in den Bode-Plot-Modus.
Zwischen PST- und Bode-Plot-Schnittstellen bestehen mehrere Unterschiede:
Verwendung der Tuning-Simulation
Zur Simulation des Tuning muss ein gültiger Anlagen-Plot im PST vorhanden sein (durch Bode-Plot-Messung oder volles Autotuning ermittelt).
Klicken Sie zur Auswahl simulierter Plot-Spuren auf die Registerkarte Plots und aktivieren Sie die folgenden Kontrollkästchen:
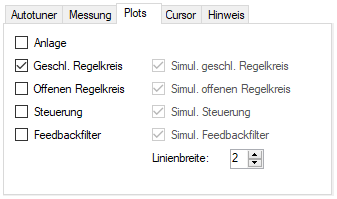
Diese gewählten Kontrollkästchen stellen die gängigste Tuning-Konfiguration dar, die Simulation erfolgt jedoch unabhängig von den aktivierten Kontrollkästchen.
Die Felder links plotten das existierende Frequenzverhalten des Servoverstärkers auf Basis der geladenen Tuning-Parameter. Die mit „Simul.“ (rechts) bezeichneten Felder verwenden die bei der Messung gewonnenen Anlagendaten und die Tuning-Parameter im PST, um die Leistung dieser Tuning-Parameter zu simulieren, ohne sie in den Servoverstärker zu laden.
Verwendung der PST-Schnittstelle für manuelles Tuning
Klicken Sie zur Verwendung der PST-Schnittstelle für manuelles Tuning auf die Registerkarte Tuning.
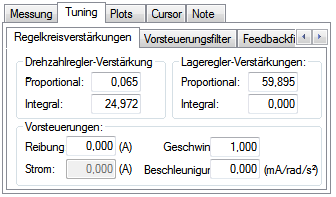
Diese Tuning-Schnittstelle lädt die Tuning-Parameter bei jeder Messung in den Servoverstärker. Die Tuning-Parameter sind unterteilt in Regelkreisverstärkungen (Geschwindigkeits-, Positionsregelkreis), Vorsteuerungspfad-Biquad-Filter und Rückführungspfad-Biquad-Filter.
Nach Änderung von Tuning-Verstärkungen müssen Sie auf die Registerkarte Lese-/Schreibzugriff und dann auf die Schaltfläche Schreibzugriff auf Tuning klicken.
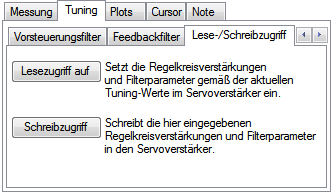
Zur Wiederherstellung des Tuning im Servoverstärker auf die PST-Schnittstelle, klicken Sie auf die Schaltfläche Lesezugriff auf Tuning.
Hinweis: Wenn Tuning-Verstärkungen geändert werden und eine Bode-Messung ohne Anklicken der Schaltfläche Schreibzugriff auf Tuning durchgeführt wird, überschreibt das PST die Tuning-Verstärkungen in der Schnittstelle mit den Tuning-Parametern in Servoverstärker.
Simulation modifizierter Regelkreisverstärkungen mit dem PST
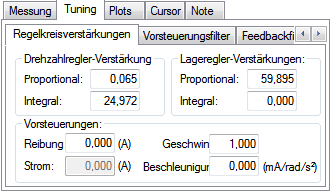
Dieses Diagramm zeigt das Ansprechverhalten eines Testsystems nach Verwendung des PST.
Die Drehzahlregler-P-Verstärkung beträgt hier 0,248. Wenn eine Anwendung nicht mit einer so hohen Güte geregelt werden muss, können Sie mit dem PST-Simulator den Motor auf die gewünschte Bandbreite abstimmen („Detuning“). Mit einer nachfolgenden Bode-Messung kann geprüft werden, ob das simulierte Frequenzverhalten korrekt ist.
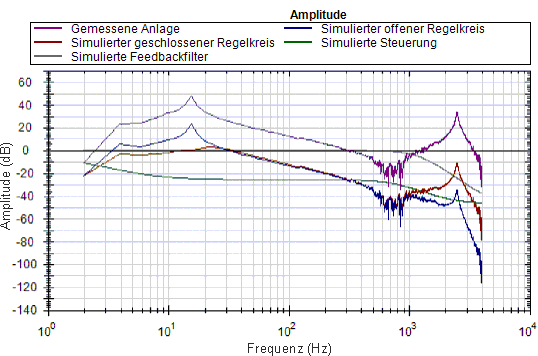
Ändern Sie mit Hilfe der Felder in der Registerkarte Regelkreisverstärkungen die Tuning-Verstärkungen, bis das gewünschte Frequenzverhalten erreicht ist.
Das simulierte Detuning von P- und I-Verstärkung des Drehzahlreglers ergibt eine Änderung der Servo-Bandbreite von ~100 Hz auf ~30 Hz.
Schreiben Sie dann die Tuning-Parameter in den Servoverstärker.Verwenden Sie hierzu die Schaltfläche Schreibzugriff auf Tuning in der Registerkarte Lese-/Schreibzugriff.
Führen Sie jetzt eine komplette Bode-Plot-Messung durch, um das simulierte Resultat mit dem neuen, gemessenen Resultat zu vergleichen.
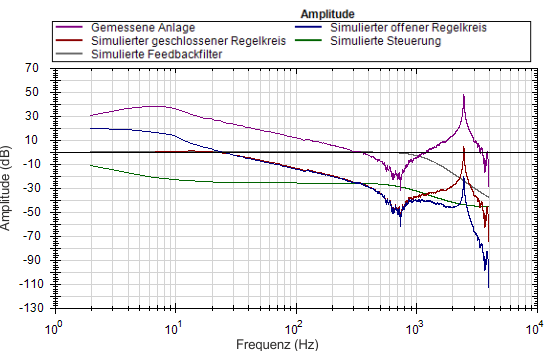
Der neu gemessene Bode-Plot zeigt, dass eine Bandbreite von knapp unter 30 Hz erzielt wurde. Der Servo ist stabil und das Tuning kann verfeinert werden, bis die gewünschte Leistung erreicht ist.
Simulation von Filtern mit dem PST
Resonanzen können das Tuning eines Servo auf vielfältige Weise komplizieren. Die Verwendung des korrekten Filters kann die Systemleistung bei vorhandenen Resonanzen deutlich steigern.
Der Bode-Plot in diesem Beispiel zeigt eine scharfe, stark ausgeprägte Schwingung bei 2500 Hz. Da es sich um die einzige Resonanz handelt, ist dies ein Hinweis darauf, dass ein Resonator-Filter (drehbarer Notch-Filter) möglicherweise die Leistung verbessert.
Klicken Sie auf die Registerkarte Vorsteuerungsfilter:
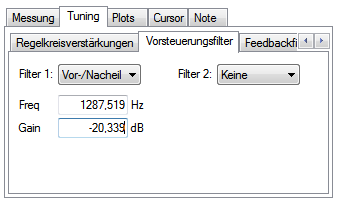
Die Resultate des Autotuning sind nach wie vor im Servoverstärker geladen und bieten ein angemessenes Tuning. Der standardmäßige Tuning-Filter ist ein Vor-/Nacheilungsfilter, der sich gut für die meisten Servoregelkreise eignet.
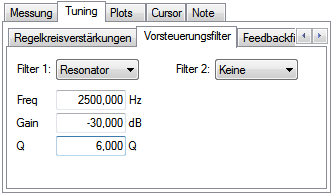
Da dieser Test eine solch hervorstechende Einzelresonanz ergibt, lässt sich durch Platzierung eines Notch-Filters an dieser Resonanz die Leistung verbessern (und Störsignale verringern).
Durch Tuning eines Resonators zur bestmöglichen Unterdrückung der Resonanz im der Anlage kann die Resonanz im offenen Regelkreis und damit im geschlossenen Regelkreis minimiert werden.
Nachstehend ist das resultierende Frequenzverhalten unter Verwendung der obigen Resonator-Konfiguration dargestellt:
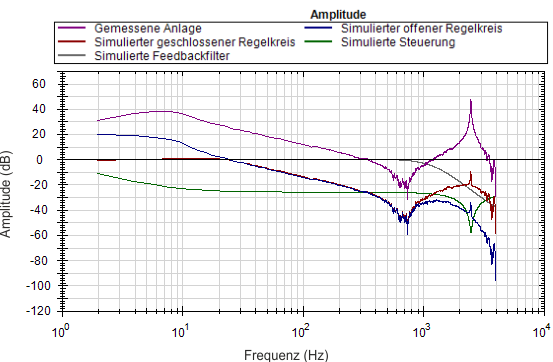
Beachten Sie die Dämpfung der Resonanz in der blauen und roten Spur (offener bzw. geschlossene Regelkreis).
Verwendung von Filters zur Reduzierung von Störsignalen
Die beste Methode zur Reduzierung von Störsignalen ist die Platzierung von Filtern im Rückführungspfad. Auf diese Weise werden die von einem verrauschten Encoder erzeugten und durch den Stromregekreis verstärkten Störsignale gedämpft. Die Störsignale können durch einen Filter im Vorsteuerungspfad gefiltert werden.Wird jedoch ein Filter im Vorsteuerungspfad platziert, der zu einer Phasennacheilung führt (z. B. Tiefpass-Filter), zeigt Ihr Bewegungsprofil diese Phasennacheilung im Befehlssignal. Durch Platzierung des Filters im Rückführungspfad wird diese Nacheilung vermieden.