 Digitale Eingänge und Ausgänge
Digitale Eingänge und Ausgänge
Übersicht
Der Servoverstärker verfügt über programmierbare Digitaleingänge und -ausgänge, die Sie zur Einleitung einer Bewegung, zur Steuerung von Zusatzgeräten oder zur Auslösung anderer Aktionen nutzen können. Die Ein- und Ausgänge müssen gemäß den Anweisungen in der Betriebsanleitung des Servoverstärkers verdrahtet werden.
Verwendung digitaler I/O
Bei korrekter Verdrahtung sind die Digitaleingänge und -ausgänge für verschiedene Funktionen einsetzbar, z. B. die Erkennung von Zusatzgeräten, die Initialisierung von Referenzfahrten oder anderen Fahraufträgen sowie die Festlegung von Verfahrwegsgrenzen. Dieses Kapitel beschreibt die spezifische Funktion der programmierbaren I/O.
Tipp zu I/O: Bei der Nutzung von I/O-Geräten müssen Sie sorgfältig darauf achten, welchen Gerätetyp Sie für Schalter verwenden. Ein ungeeigneter Schalter verursacht möglicherweise eine Schalterprellung, die wiederum zu Fehlauslösungen führen kann. Beispiel: Ein preisgünstiger xx-Schalter prellt beim Umschalten mehrere Male, bevor er sich ein- bzw. ausschaltet. Ein Gerät, dass diese Eingänge häufig überwacht, könnte das Prellen als mehrfache Auslösung des I/O interpretieren.Der Servoverstärker ist zur Reduzierung dieser Art von Fehler mit einigen Entprelltechniken ausgestattet, die dafür sorgen, dass plötzliche Statuswechsel infolge von Prellen ignoriert werden.
Digitale Eingänge
Digitaleingänge können je nach gewünschter Funktion auf verschiedene Modi gesetzt werden. Diese Funktionen werden nachfolgend erläutert.
Dieser Modus ist der Aus-Zustand und entspricht der Standardeinstellung für den Servoverstärker. Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Wenn ein mit diesem Modus konfigurierter Eingang aktiv wird, versucht der Servoverstärker, alle aktiven Fehler zu löschen. Dieser Modus wird durch eine Flanke ausgelöst, d. h. die Aktion findet nur ein Mal statt. Liegt die Bedingung, die den Fehler ausgelöst hat, weiterhin vor, bleibt der Fehlerzustand bestehen. Siehe Fehler und Warnmeldungen für Details zum Verhalten der einzelnen Fehler.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Dieser Modus dient zum Start des Fahrauftrags x, wobei x den Wert des zugehörigen Eingangsparameters darstellt. Dieser Eingang löst eine Fahrauftragsnummer gemäß Festlegung im Feld für Zusatzparameter für diesen Eingang aus.
Dieser Modus ist nur für Betriebsart 2 (Position) und Sollwertquelle 0 (Service) gültig.
Nach dem Start läuft der Fahrauftrag bis zur vollständigen Ausführung weiter. Änderungen am Eingang, der den Auftrag gestartet hat, werden ignoriert, bis der Fahrauftrag abgeschlossen ist. Wenn mehrere Eingänge zum Starten eines Fahrauftrags konfiguriert sind, werden alle diese Eingänge bis zum Abschluss des Auftrags ignoriert. Wenn bereits ein Fahrauftrag im Servoverstärker aktiv ist, werden Änderungen an diesem Eingang ignoriert.
Beispiel:
-->DIN1.MODE 2 - Setzt den Eingangsmodus auf Fahrauftrag starten.
-->DIN1.PARAM 1 - Legt fest, dass der zu startende Fahrauftrag 1 ist.
-->MT.LIST - Stellt sicher, dass der Fahrauftrag 1 existiert.
-->10.000 [counts] 1000.000 [rpm] 0 1001.358 [rpm/s] 1001.358 [rpm/s] 0 0 0 [ms]
<Erstellt eine positive Flanke des Eingangs.>
<Fahrauftrag 1 ausgeführt>
Modus 3: Fahrauftrag-Auswahlbit
Dieser Modus wird verwendet, um die Fahraufträge, die im Verstärker gespeichert sind (Nummern 1 bis 127), oder die Referenzfahrt (0) auszuwählen. Die Nummer des Fahrauftrags wird extern an den Digitaleingängen angezeigt. Der durch diesen Modus festgelegte Fahrauftrag wird ausgeführt, wenn der Digitaleingang, der dem Modus 4 zugeordnet ist (ausgewählter Start von Fahrauftrag), eine positive Flanke erhält.
Dieser Modus ist nur für Betriebsart 2 (Position) und Sollwertquelle 0 (Service) gültig.
Beispiel
Voraussetzung:
DIN1.MODE = DIN2.MODE=DIN3.MODE =3
Der Status von Eingang 1 und 3 ist 1.
Der Status von Eingang 2 ist 0.
Fahrauftrag 5 (5 = 20+22) wird ausgeführt.
Modus 4: Fahrauftrag Starten ausgewählt
Dieser Modus wird verwendet, um den Fahrauftrag zu starten, der im Servoverstärker gespeichert ist, indem die Nummer des Fahrauftrags angegeben wird. Dieser Eingang verwendet eine sekundäre Variable für die Nummer des Fahrauftrags, der mit dem Eingangstrigger gestartet werden soll. Die sekundäre Variable wird durch Modus 3 festgelegt (Fahrauftrag-Auswahlbit).
Fahrauftrag Nummer „0“ startet die Referenzfahrt. Eine steigende Flanke startet den Fahrauftrag. Eine fallende Flanke hat keine Wirkung.
Dieser Modus ist nur für Betriebsart 2 (Position) und Sollwertquelle 0 (Service) gültig.
Modus 5: Referenzfahrt starten
Dieser Modus wird verwendet, um den Referenzfahrauftrag an der positiven Flanke zu starten. Die negative Flanke wirkt sich auf diesen Eingangsbetriebsmodus nicht aus.
Dieser Modus ist nur für Betriebsart 2 (Position) und Sollwertquelle 0 (Service) gültig.
Dieser Modus wird verwendet, um eine Bewegung im Tippbetrieb zu starten. Dieser Eingangsmodus verwendet eine sekundäre Variable für die Geschwindigkeit des Tippbetriebs. Der Tippbetrieb startet bei einer positiven Flanke. Eine negative Flanke stoppt den Tippbetrieb.
Dieser Modus ist für Betriebsart 1 (Geschwindigkeit) und 2 (Position) und Befehlsquelle 0 (Service) gültig.
Dieser Modus wird verwendet, um die aktuelle Verstärkerposition als Nullimpuls für den Verstärker-EEO zu definieren, und legt den Nullimpuls-Offset des Inkrementalgebers fest. Die aktuelle Position, die von der festgelegten Auflösung des Inkrementalgebers abhängt, wird an der steigenden Flanke berechnet (aber nicht, wenn beim Booten des Antriebs ein HIGH Signal anliegt) und als Offset gespeichert. Daraufhin wird eine automatische Speicherung generiert. Diese Funktion wird verwendet, um eine automatische Einstellung des Nullimpulses während einer Umdrehung des Motors durchzuführen.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Dieser Modus dient zur Ausführung vier verschiedener Befehlspuffer-Sätze. Jeder Satz enthält zwei Puffer: Low und High, für insgesamt acht Puffer. DINx.PARAM für diesen Modus kann 1 bis 4 lauten und bestimmt, welcher Puffersatz verwendet wird.
Die Befehle DIN.HCMDx und DIN.LCMDx (1<=x<=4) dienen zur Einstellung der High- und Low-Werte der acht Puffer vom Terminal-Bildschirm aus. Verwenden Sie ";" als Trennzeichen zwischen den beiden Pufferbefehlen. Jeder Puffer enthält bis zu 128 Zeichen.
Beispiel
-->DIN1.MODE 9 (Einstellung des Befehlpuffer-Modus auf Digitaleingang 1)
-->DIN1.PARAM 1 (Einstellung des ersten Puffersatzes auf Digitaleingang 1)
-->DIN.HCMD1 DRV.OPMOE 1; (Einstellung des High- Befehlspuffers)
-->DIN.LCMD1 DRV.OPMOE 0; (Einstellung des Low- Befehlspuffers)
In dieser Konfiguration setzt eine positive Flanke an Digitaleingang 1 den Wert für DRV.OPMODE auf 1, und eine negative Flanke setzt DRV.OPMODE auf 0.
Sie können die Befehlspuffer auch auf der Digital I/O Bildschirmseite in WorkBench einstellen; siehe Befehlspuffer.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 10: Fehlerrelais ansteuern
Dieser Modus wird verwendet, um einen externen Fehler zu erzeugen.
Eingangszustand ist 0 – normales Verhalten des Verstärkers
Eingangszustand ist 1 – „Fehler 245 – externer Fehler“ wird ausgegeben.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 11: Referenzfahrt-Schalter
Dieser Modus wird verwendet, um einen physischen Referenzfahrt-Schalter an der Maschine zu erhalten, der für die verschiedenen Referenzfahrttypen verwendet wird.
Dieser Modus ist nur für Betriebsart 2 (Position) und Sollwertquelle 0 (Service) gültig.
Modus 13: Kontrollierter Stopp
Dieser Modus wird verwendet, um den Motor mit der Rampe für die Verzögerungsvariable zu stoppen. Wenn die Nullgeschwindigkeit erreicht ist, wird die Leistungsstufe deaktiviert. Siehe auch CS Parameters und Kontrollierter Stopp.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Dieser Modus wird verwendet, um den Motor zu stoppen. Er entspricht der Ausgabe eines DRV.STOP-Befehls.
Dieser Modus ist für alle Betriebsarten sowie die Sollwertquellen 0 (Service) und 2 (elektronisches Getriebe) gültig.
Modus 16: Elektronisches Getriebe aktivieren
Dieser Modus startet/aktiviert ein elektronisches Schaltverfahren bei einer positiven Flanke.
Dieser Modus ist nur für Betriebsart 2 (Position) und Sollwertquelle 2-Elektronisches Getriebe gültig.
Modus 17: Positionsverschiebung des elektronischen Getriebes aktivieren
Dieser Modus wird verwendet, um dem Getriebe bei einer positiven Flanke eine Positionsverschiebung hinzuzufügen. Die Strecke der Positionsverschiebung wird durch die sekundäre Variable festgelegt. Die sekundäre Variable wird durch DINx.PARAM festgelegt. Der Parameter wird in Positionseinheiten angegeben und wird verwendet, um eine Phasenverschiebung während des Betriebs im elektronischen Getriebemodus hinzuzufügen.
Dieser Modus ist nur für Betriebsart 2 (Position) und Sollwertquelle 2-Elektronisches Getriebe gültig.
Beispiel
Ein Eingang ist so eingestellt, dass er bei Auslösung eine Phasenverschiebung um 180 Grad hinzufügt. Wenn der Verstärker dem Eingang für das elektronische Getriebe folgt, wird der Eingang ausgelöst und der Motor folgt der Beschleunigungs- und Verzögerungsrate des Verstärkers, um eine Verschiebung um 180 Grad auszuführen, während die Getriebesynchronisation aufrechterhalten wird.
Dieser Modus bewirkt, dass der Eingang als positiver Endschalter fungiert. Wenn der Positiv-Endschaltereingang ausgelöst wird (das Signal abfällt), wird die Bewegung in positiver Richtung gestoppt.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
-
-
Beim Einrichten der Hardware-Endschalter müssen Sie sicherstellen, dass der Schalter im ausgelösten Zustand verbleibt, bis eine Bewegung vom Schalter weg erfolgt. Eine sehr geringe Verzögerungsrate in Kombination mit einer hohen Annäherungsgeschwindigkeit kann zu Überschwingung (Überschießen) führen. Diese Aktion führt zum Abbruch der Positionsgrenzwarnung. Die Warnung ist nicht selbsthaltend, daher kann es bei einem Überschwingen des Schalters zu einer zusätzlichen Bewegung in dieselbe Richtung kommen (sofern befohlen). Diese Bewegung kann Schäden an der Maschine verursachen.
Dieser Modus bewirkt, dass der Eingang als negativer Endschalter fungiert. Wenn der Negativ-Endschaltereingang ausgelöst wird (das Signal abfällt), wird die Bewegung in negativer Richtung gestoppt.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
-
-
Beim Einrichten der Hardware-Endschalter müssen Sie sicherstellen, dass der Schalter im ausgelösten Zustand verbleibt, bis eine Bewegung vom Schalter weg erfolgt. Eine sehr geringe Verzögerungsrate in Kombination mit einer hohen Annäherungsgeschwindigkeit kann zu Überschwingung (Überschießen) führen. Diese Aktion führt zum Abbruch der Positionsgrenzwarnung. Die Warnung ist nicht selbsthaltend, daher kann es bei einem Überschwingen des Schalters zu einer zusätzlichen Bewegung in dieselbe Richtung kommen (sofern befohlen). Diese Bewegung kann Schäden an der Maschine verursachen.
Dieser Modus wird verwendet, um die Bremse zu betätigen oder zu lösen, wenn der Verstärker nicht aktiv ist.
Eingang = 0: Der Verstärker steuert die Bremse (normales Verhalten des Verstärkers)
Eingang = 1: Der Benutzer steuert die Bremse (Lösen oder Schließen mithilfe von Befehlen).
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Dieser Modus wird verwendet, um den Verstärkerstrom zu begrenzen. Die Strombegrenzung wird durch eine sekundäre Variable festgelegt; verwenden Sie DINx.PARAM, um die sekundäre Variable einzustellen.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
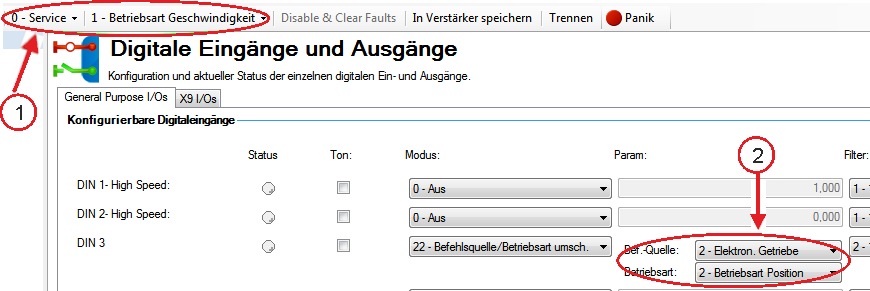
Modus 22: Umschalten von Betriebsart und Befehlsquelle
Dieser Modus dient zur Umschaltung zwischen der aktuellen Befehlsquelle/Betriebsart und einer weiteren Einstellung für Befehlsquelle/Betriebsart, die vom Benutzer bei Pegeländerung eines Digitaleingangs vorgewählt ist. Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle. Pfeil 1 im Screenshot unten zeigt die aktuelle, für den Servoverstärker eingestellte Befehlsquelle/Betriebsart an. Der Servoverstärker befindet sich in diesem Modus, wenn der Digitaleingang nicht auf High gesetzt ist. Dieser Low-Status wird durch die ursprünglichen Einstellungen für DRV.CMDSOURCE und DRV.OPMODE bestimmt.
Der Servoverstärker wechselt zu der in Pfeil 2 dargestellten Befehlsquelle/Betriebsart, wenn der Pegel des Digitaleingangs auf High wechselt. Diese Einstellung wird durch DINx.PARAM gespeichert und über die Dropdown-Felder bei Pfeil 2 bearbeitet.
-
-
Wenn der Status des Digitaleingangs auf High wechselt, nehmen DRV.CMDSOURCE und DRV.OPMODE die durch DINx.PARAM definierten Werte an. Führen Sie in diesem Status keine Servoverstärker-Speicherung durch, da ansonsten die Einstellungen für die Stati Low und High identisch werden.
| DINX.PARAM | Sollwertquelle | Betriebsart |
|---|---|---|
|
0 |
0-Service |
0-Drehmoment |
|
1 |
0-Service |
1-Geschwindigkeit |
|
2 |
0-Service |
2-Position |
|
10 |
1-Feldbus |
0-Drehmoment |
|
11 |
1-Feldbus |
1-Geschwindigkeit |
|
12 |
1-Feldbus |
2-Position |
|
– |
2-Elektronisches Getriebe |
0-Drehmoment |
|
– |
2-Elektronisches Getriebe |
1-Geschwindigkeit |
|
22 |
2-Elektronisches Getriebe |
2-Position |
|
30 |
3-Analog |
0-Drehmoment |
|
31 |
3-Analog |
1-Geschwindigkeit |
|
32 |
3-Analog |
2-Position |
Wenn mehrere Digitaleingänge für diese Betriebsart konfiguriert sind und einer der Eingänge aktiv ist, wird die für diesen Eingang kombinierte Kombination aus Sollwertquelle/Betriebsart aktiv. Wenn zusätzliche Eingänge aktiv werden, dann ist die für den Eingang mit der niedrigsten Nummer konfigurierte Kombination aus Befehlsquelle/Betriebsart aktiv.
Beispiel
Voraussetzung:
Eingang 1 ist für elektronisches Getriebe/Position konfiguriert.
Eingang 2 ist für Service/Geschwindigkeit konfiguriert.
Eingang 3 ist für Feldbus/Position konfiguriert.
Das System befindet sich in der Betriebsart Service/Drehmoment.
Resultat:
Sind keine Eingänge aktiv, verbleibt das System in der Betriebsart Service/Drehmoment.
Wird Eingang 3 als erstes aktiv, wechselt das System zur Betriebsart Feldbus/Position.
Wird Eingang 2 als erstes aktiv, wechselt das System zur Betriebsart Service/Geschwindigkeit.
Wird dann Eingang 1 aktiv, wird dieser zum Eingang mit der niedrigsten Nummer, d. h. das System wechselt zur Betriebsart elektronisches Getriebe/Position.
Wird dann Eingang 2 aktiv, ist Eingang 1 nach wie vor derjenige mit der niedrigsten Nummer, d. h. es gibt keine Veränderung.
Wird dann Eingang 3 inaktiv, ist Eingang 1 nach wie vor derjenige mit der niedrigsten Nummer, d. h. es gibt keine Veränderung.
Wird dann Eingang 1 inaktiv, wird Eingang 2 zum Eingang mit der niedrigsten Nummer, d. h. das System wechselt zur Betriebsart Service/Geschwindigkeit.
Wird dann Eingang 2 inaktiv, sind keine Eingänge mehr aktiv, d. h. das System kehrt zur Betriebsart Service/Drehmoment zurück.
Modus 23: Änderung des algebraischen Vorzeichens der gemessenen Analogeingangsspannung
Dieser Modus kann entweder das algebraische Vorzeichen der gemessenen Analogeingangsspannung ändern oder den Wert über einen Digitaleingang auf Null setzen. Da die Analogeingangsspannung zur Erzeugung von Sollwerten in DRV.CMDSOURCE=3 (analoge Sollwertquelle) dient, kann Modus 23 auch verwendet werden, um die Bewegungsrichtung zu ändern oder die Bewegung über einen Digitaleingang in DRV.CMDSOURCE=3 zu stoppen.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle 3 (analog).
Der Wert von DINx.PARAM definiert den Wert eines Multiplikationsfaktors für die gemessene Analogspannung. Das niederwertige Byte des Wertes für DINx.PARAM bestimmt den Wert dieses Faktors, der bei steigender Flanke am verknüpften Digitaleingang mit der gemessenen Analogeingangsspannung multipliziert wird. Das höherwertige Byte bestimmt wie folgt den Faktor bei abfallender Flanke:
DINx.PARAM = 0xFFRR (F = Fallende Flanke; R = Steigende Flanke)
In diesem Modus werden folgende Werte verwendet:
| Wert | Beschreibung |
|---|---|
|
0x00 |
Nullsetzen der gemessenen Analogspannung. |
|
0x01 |
Multiplikation der Analogspannung mit 1. |
|
0x02 |
Multiplikation der Analogspannung mit -1. |
|
0x03 |
Nullsetzen der gemessenen Analogspannung und zusätzliches Auslösen eines Software-Enable. |
|
0x04 |
Multiplikation der Analogspannung mit 1 und zusätzliches Auslösen eines Software-Enable. |
|
0x05 |
Multiplikation der Analogspannung mit -1 und zusätzliches Auslösen eines Software-Enable. |
|
0x06 |
Nullsetzen der gemessenen Analogspannung und zusätzliches Auslösen eines Software-Disable. |
|
0x07 |
Multiplikation der Analogspannung mit 1 und zusätzliches Auslösen eines Software-Disable. |
|
0x08 |
Multiplikation der Analogspannung mit -1 und zusätzliches Auslösen eines Software-Disable. |
Beispiel 1
DINx.PARAM = 513 = 0x0201
Die gemessene Analogeingangsspannung wird bei steigender Flanke des verknüpften Digitaleingangs mit einem Faktor von 1 multipliziert.
Die gemessene Analogeingangsspannung wird bei abfallender Flanke des verknüpften Digitaleingangs mit einem Faktor von -1 multipliziert.
Beispiel 2
DINx.PARAM = 256 = 0x0100
Die gemessene Analogeingangsspannung wird bei steigender Flanke des verknüpften Digitaleingangs mit einem Faktor von 0 multipliziert.
Die gemessene Analogeingangsspannung wird bei abfallender Flanke des verknüpften Digitaleingangs mit einem Faktor von 1 multipliziert.
Beispiel 3
DINx.PARAM = 1540 = 0x0604
Die gemessene Analogeingangsspannung wird bei steigender Flanke des verknüpften Digitaleingangs mit einem Faktor von 1 multipliziert. Zusätzlich löst die steigende Flanke am verknüpften Eingang ein Software-Enable ähnlich dem Befehle DRV.EN aus.
Die gemessene Analogeingangsspannung wird bei abfallender Flanke des verknüpften Digitaleingangs mit einem Faktor von 0 multipliziert. Zusätzlich löst die abfallende Flanke am verknüpften Eingang ein Software-Disable ähnlich dem Befehl DRV.DIS aus.
Modus 25: Kontrollierter Stopp ohne Wiederaktivierung.
Nach einem kontrollierten Stopp wird der Verstärker nicht wieder freigegeben, wenn ein High-Signal anliegt. Stattdessen muss der Verstärker vom Benutzer freigegeben werden.
Modus 26: Bewegung unterbinden
Die aktuelle Bewegung wird gestoppt, weitere Bewegungen werden unterbunden, der Antrieb bleibt jedoch aktiviert. Die Achse verzögert mit der Bremsbeschleunigung definiert von CS.DEC .
Die Bewegung wird unterbunden, wenn DRV.MOTIONDISSOURCES = 1.
Digitale Ausgänge
Digitaleingänge können je nach gewünschter Funktion auf verschiedene Modi gesetzt werden. Diese Funktionen werden nachfolgend erläutert.
-
-
Wenn ein Ausgang überlastet ist (> 100 mA), wird der Ausgang ausgeschaltet (ohne Anzeige in WorkBench) und bleibt ausgeschaltet, bis einer der folgenden Fälle eintritt:
- Die Spannungsversorgung des Ausgangs wird abgeschaltet.
- Der Ausgang wird von der Firmware ausgeschaltet.
- Die 24-V-Versorgung des AKD wird aus- und wiedereingeschaltet.
Modus 0-Benutzer (Vorgabe = 0): Der Ausgangsstatus wird durch den Benutzer oder den Feldbus bestimmt. Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 1-Netz bereit: Der Ausgangsmodus erzeugt ein High-Signal, wenn die DC-Busspannung des Servoverstärkers über dem Pegel für Unterspannungsfehler und unter dem Pegel für Überspannungsfehler liegt. Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 2-Software-Grenze: Dieser Ausgang wird bei Erreichen der Software-Grenzpositionen aktiviert. Dieser Ausgang erzeugt ein High-Signal, wenn eine Software-Grenze durch Bewegung in Richtung dieser Software-Grenze erreicht wird. Software-Grenzen werden in der Ansicht Grenzwerte eingestellt. Im Fenster Grenzwerte ist Position 0 der Positionsgrenzwert für negativen Verfahrweg und Position 1 der Positionsgrenzwert für positiven Verfahrweg.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 3-MT in Position: Wenn die Bewegung eines Fahrauftrags beendet ist, die Trajektorie Null erreicht und keine nachfolgenden Fahraufträge anliegen, wird die Bewegung als abgeschlossen betrachtet, und der Ausgang wird aktiviert, wenn die Istposition innerhalb von „target_position_area“ liegt wobei „target_position_area“ Folgendem entspricht:
target_position_area = motion_task_taget_position +/- MT.TPOSWND
Modus 3 und Modus 17 (MT in Position) sind meist identisch. Modus 17 löst aus, sobald sich die Last im Positionsfenster befindet, während Modus 3 mit der Überwachung des Fensters wartet, bis die Trajektorie beendet ist. Modus 17 signalisiert infolgedessen eventuell schneller, und es könnte zeitweise zu einem „Herausprellen“ aus dem Fenster kommen.
Modus 4 - Positionsfehler-Überwachung: Dieser Ausgangsmodus erzeugt ein High-Signal, wenn der Absolutwert des Positionsfehlers unter dem Wert liegt, der in das Feld für Zusatzparameter eingegeben wurde, und der Servoverstärker freigegeben ist.
-DOUx.PARAM < PL.ERR < DOUTx.PARAM
Modus 5-Position größer als X: Der Ausgang wird aktiviert, wenn der Positionswert größer ist als der Parameterwert im Feld für Zusatzparameter.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 6-Position kleiner als X: Der Ausgang wird aktiviert, wenn der Positionswert kleiner ist als der Parameterwert im Feld für Zusatzparameter.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 7-Warnung: Dieser Ausgang wird aktiviert, wenn im Servoverstärker eine Warnung auftritt, z. B. wegen Auslösung eines positiven oder negativen Endschalterausgangs.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Mode 8-Freigabe: Verwenden Sie diesen Ausgangsmodus, wenn Sie einen Ausgang zur Anzeige der Servoverstärker-Freigabe benötigen.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 10-Motorbremse: Dieser Ausgangsmodus erzeugt ein High-Signal, wenn eine Bremse gelöst wird (d. h. wenn Strom an die Bremse angelegt wird und der Motor frei drehen kann). Dieser Ausgangsmodus erzeugt ein Low-Signal, wenn eine Bremse betätigt wird (d. h. wenn die Bremse nicht mehr angesteuert wird).
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 11-Servoverstärker-Fehler: Der Ausgangsmodus erzeugt ein High-Signal, wenn ein Fehler am Servoverstärker vorliegt.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 12-Absolute Geschwindigkeit größer als x: Dieser Ausgangsmodus erzeugt ein High-Signal, wenn der Absolutwert der Geschwindigkeit größer ist als die Variable x. Verwenden Sie DOUTx.PARAM zur Einstellung von x.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 13-Absolute Geschwindigkeit niedriger als x: Dieser Ausgangsmodus erzeugt ein High-Signal, wenn der Absolutwert der Geschwindigkeit kleiner ist als die Variable x.
Verwenden Sie DOUTx.PARAM zur Einstellung von x.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Modus 14-Referenzfahrt abgeschlossen: Der Ausgang gibt ein High Signal aus, wenn die Referenzierung abgeschlossen ist.
Dieser Modus ist nur für Betriebsart 2 (Position) und Sollwertquelle 0 (Service) gültig.
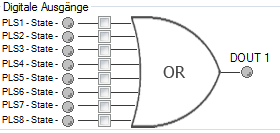
Modus 15- Programmierbarer Endschalter Ausgang: Der Ausgang gibt ein High Signal aus, wenn mindestens eines der PLS.STATE Bits auf High gesetzt ist (PLS ist aktiv) und das entsprechende Bit im Parameter DOUTx.PARAM ebenfalls auf High gesetzt wurde. Der Befehl DOUTx.PARAM verbindet die PLS.STATE Bits mit dem Digitalausgang selbst und fungiert somit als Freigabemaske.
In Modus 15 werden die Parameter DOUTx.PARAM auf der Bildschirmseite "Programmierbare Endschalter" im Bereich Digitale Ausgänge eingestellt. Siehe Programmierbarer Endschalter.
Dieser Modus ist gültig für alle Kombinationen aus Betriebsart und Sollwertquelle.
Beispiel
|<- Bit 7 bis 0 ->|
DOUT1.PARAM = 23 = 0b 0 0 0 1 0 1 1 1 (Binärcode)
Digitalausgang 1 ist aktiv, wenn Bit 0 oder Bit 1 oder Bit 2 oder Bit 4 von PLS.STATE auf High gesetzt ist. Alle anderen Bits in PLS.STATE werden auf Grund der Einstellung von DOUT1.PARAM nicht vom digitalen Ausgangsmodus berücksichtigt. Verwenden Sie in diesem besonderen digitalen Ausgangsmodus keine Dezimalstellen für den Parameter DOUTx.PARAM.
Modus 16 - Befehlspuffer Aktiv: Dieser Ausgangsmodus erzeugt ein High-Signal, wenn die Befehle im Befehlspuffer des digitalen Eingangs ausgeführt werden.
Modus 17 - Reserviert
Modus 17-Fahrauftrag in Position: Dieser Ausgang wird aktiviert, wenn der Positionswert ein Fenster um die Zielposition des aktiven Fahrauftrags herum erreicht, dem keine weiteren Fahraufträge folgen. Die Fenstergröße für die Zielposition des Fahrauftrags kann über den Parameter MT.TPOSWND zugewiesen werden.
target_position_area = motion_task_taget_position +/- MT.TPOSWND
Modus 3 und Modus 17 (MT in Position) sind meist identisch. Modus 17 löst aus, sobald sich die Last im Positionsfenster befindet, während Modus 3 mit der Überwachung des Fensters wartet, bis die Trajektorie beendet ist. Modus 17 signalisiert infolgedessen eventuell schneller, und es könnte zeitweise zu einem „Herausprellen“ aus dem Fenster kommen.
DOUTx.STATE gibt in den Modi 19 und 23 immer eine 0 zurück.
Modus 20 – Kontrollierter Stopp aktiv: Dieser Ausgang erzeugt ein High-Signal, wenn kein kontrollierter Stopp aktiv ist. Wenn ein kontrollierter Stopp ausgeführt wird, wechselt das Signal auf Low und bleibt Low bis der kontrollierte Stopp beendet ist.
Modus 21 – Fehler sperrt die Endstufe sofort: Dieser Ausgangsmodus liefert ein Low Signal, wenn ein Fehler die Leistungsendstufe direkt sperrt oder wenn der Hardware Enable Eingang nicht angesteuert ist (Low). Der Ausgang bleibt 500ms auf Low.
Modus 22 – Status Einschaltrelais: Dieser Ausgang erzeugt ein Low Signal, wenn das Einschaltrelais offen ist. Dieser Ausgangsmodus erzeugt ein High-Signal, wenn das Einschaltrelais geschlossen ist.
Mode 23 – Compare Ausgabe: Der Status des Komparators(Compare) wird ausgegeben. Es gibt zwei Komparatoren (Compare 0 und 1), mit DOUTx.PARAM wird der Komparator ausgewählt, dessen Status ausgegeben wird.
Komparatoren (Vergleicher) | CMP Parameters
Modus 24 - STO Status: Dieser Modus erzeugt ein Low-Signal wenn der STO Eingang ein Signal erhält. Der Modus erzeugt ein High-Signal wenn der STO Eingang kein Signal erhält und die Endstufe gesperrt ist. Dies ist die umgekehrte Funktion des Kommandos STO.STATE .
Modus 25 - W&S Abgeschlossen: Dieser Ausgangsmodus erzeugt ein High-Signal, wenn Wake&Shake abgeschlossen ist, also wenn WS.STATE gleich 0 ist. Alle anderen WS.State erzeugen über Modus 25 ein Low-Signal.
Modus 26 - PWM Ausgabe: Ein konfigurierbares Pulse Width Modulation (PWM) Signal wird ausgegeben. Nur an den digitalen Ausgängen 9, 10 und 11 verfügbar. Siehe PWM Ausgang.
Modus 27 - Warnnummer: Dieser Ausgabemodus erzeugt ein hohes Signal, wenn eine bestimmte Warnung aktiv ist, die durch Eingabe der Warnnummer in DOUTx.PARAM ausgewählt wird.
Übersicht über die Abhängigkeiten von Betriebsart und Sollwertquelle
| DINx.MODE | Modusbeschreibung | Betriebsart | Sollwertquelle |
|---|---|---|---|
|
0 |
Aus |
alle |
alle |
|
1 |
Fehler Reset |
alle |
alle |
|
2 |
Starte Motion Task |
2-Position |
0-Service |
|
3 |
Motion Task Auswahlbit |
2-Position |
0-Service |
|
4 |
Motion Task Auswahl Start |
2-Position |
0-Service |
|
5 |
Referenzfahrt starten |
2-Position |
0-Service |
|
6 |
Tippbetrieb starten |
1-Geschwindigkeit 2-Position |
0-Service |
|
8 |
Zero Latch |
alle |
alle |
|
9 |
Befehlspuffer |
alle |
alle |
|
10 |
Steuerung des Fehlerrelais |
alle |
alle |
|
11 |
Referenzfahrt-Schalter |
2-Position |
0-Service |
|
13 |
Kontrollierter Stopp |
alle |
alle |
|
15 |
Schnellhalt |
alle |
0-Service |
|
16 |
Elektron. Getriebe aktivieren |
2-Position |
2-Elektronisches Getriebe |
|
17 |
Pos.-Verschiebung Elektron.Getriebe |
2-Position |
2-Elektronisches Getriebe |
|
18 |
Positiver Endschalter |
alle |
alle |
|
19 |
Negativer Endschalter |
alle |
alle |
|
20 |
Bremse lösen |
alle |
alle |
|
21 |
Strombegrenzung |
alle |
alle |
|
22 |
Befehlsquelle/Betriebsart umsch. |
alle |
alle |
|
23 |
Analoge Steuerung |
alle |
3-Analog |
| 25 | Kontrollierter Stopp ohne Wiederaktivierung. | alle | alle |
| 26 | Bewegung unterbechen | alle | alle |
| DOUTx.MODE | Modusbeschreibung | Betriebsart | Sollwertquelle |
|---|---|---|---|
|
0 |
Anwender- (Vorgabe=0) |
alle |
alle |
|
1 |
Betriebsspannung bereit |
alle |
alle |
|
2 |
Software-Endschalter |
alle |
alle |
|
3 |
Bewegung abgeschlossen |
2-Position |
0-Service |
|
4 |
Positionfehler Anzeige |
2-Position |
alle |
|
5 |
Position > x |
alle |
alle |
|
6 |
Position < x |
alle |
alle |
|
7 |
Warnung |
alle |
alle |
|
8 |
Enable |
alle |
alle |
|
10 |
Motorbremse |
alle |
alle |
|
11 |
Fehler |
alle |
alle |
|
12 |
Absolute Geschwindigkeit > x |
alle |
alle |
|
13 |
Abs. Geschwindigkeit < x |
alle |
alle |
|
14 |
Referenzfahrt beendet |
2-Position |
0-Service |
|
15 |
Programmierbarer Endschalter |
alle |
alle |
| 16 | Befehlspuffer aktiv | alle | alle |
| 17 | Fahrauftrag in Position | ||
| 20 | Kontrollierter Stopp Aktiv | alle | alle |
| 21 | Sofortige Sperre nach Fehler. | alle | alle |
| 22 | Status Einschaltrelais | alle | alle |
| 23 | Ausgang Komparator | alle | alle |
| 24 | STO-Status | alle | alle |
| 25 | W&S Abgeschlossen | alle | alle |
| 26 | Ausgang PWM | alle | alle |
| 27 | Warnnummer | alle | alle |







