Übersicht
In diesem Kapitel wird das Tuning-Verfahren für Drehzahl- und Positionsregelkreise des AKD beschrieben. Das Servo-Tuning umfasst die Einstellung verschiedener Koeffizienten des Servoverstärkers, die dieser für die optimal auf Ihre Anwendung abgestimmte Steuerung des Servomotors benötigt. In diesem Kapitel werden einige der verfügbaren Tuning-Methoden beschrieben. Sie erhalten eine Beschreibung der verschiedenen Tuning-Methoden und ihrer Verwendung.
Der AKD nutzt hauptsächlich drei Betriebsarten: Drehmoment, Geschwindigkeit und Position. Für die Drehmoment-Betriebsart ist ein Tuning des Servoregelkreises nicht erforderlich. Die Tuning für den Geschwindigkeits- und den Positionsregelkreis wird nachstehend behandelt.
Der AKD verfügt über einen Autotuner, der die für zahlreiche Anwendungen benötigte Feineinstellung ausführt. In diesem Abschnitt werden das Tuning-Verfahren und speziell die Einstellung des AKD für Fälle beschrieben, in denen der Benutzer den Autotuner nicht einsetzen will.
In diesem Kapitel liegt der Schwerpunkt auf das Tuning im Zeitbereich. Das bedeutet, es wird das Geschwindigkeits- oder Positionsverhalten im Zeitverlauf als Kriterium für die Qualität des Tunings für einen Regelkreis untersucht.
Festlegen der Tuning-Kriterien
Die Auswahl der richtigen Spezifikationen für eine Maschine ist Voraussetzung für das Tuning. Nur wenn Sie genau verstehen, welche Leistung erforderlich ist, um die Maschine in die Produktion zu bringen, verläuft der Tuning-Prozess reibungslos und ohne Probleme. Nehmen Sie sich genügend Zeit, um ALLE Anforderungen der Maschine festzulegen - nichts ist zu trivial.
- Bestimmen Sie die wichtigsten Kriterien. Die Maschine wurde vermutlich unter Berücksichtigung einer bestimmten Leistung entwickelt und konstruiert. Nehmen Sie ALLE Leistungskriterien in die Spezifikation auf. Machen Sie sich keine Gedanken darüber, ob die Kriterien wissenschaftlich klingen. ( Wenn z. B. die Bewegung optisch gleichmäßig aussehen muss, nehmen Sie dies in die Spezifikation auf. Wenn keine Geräusche zulässig sind, nehmen Sie dies in die Spezifikation auf.) Bei Abschluss der Entwicklungsphase sollte die Leistung der Maschine der zuvor in der Spezifikation festgelegten Leistung entsprechen. Damit wird sichergestellt, dass die Maschine ihre Sollleistung erreicht und für den Einsatz in der Produktion bereit ist.
- Testen Sie die Maschine mit realistischen Bewegungen. Stellen Sie die Maschine nicht nur auf eine kurze lineare Bewegung ein, wenn sie im realen Einsatz S-förmige Bewegungen ausführen soll. Nur wenn Sie die Maschine mit realistischen Bewegungen testen, können Sie zuverlässig feststellen, ob sie für den Einsatz in der Produktion bereit ist.
- Legen Sie einige spezifische quantitative Kriterien fest, um inakzeptable Bewegungen zu identifizieren. Es ist besser, im Vorfeld eine inakzeptable Bewegung zu identifizieren, als durch wiederholte Versuche feststellen zu wollen, an welchem Punkt eine akzeptable Bewegung inakzeptabel wird. Nachfolgend finden Sie einige Beispiele für Bewegungskriterien:
- +/– x Positionsfehler während der gesamten Bewegung
- Einstellung auf +/- x Positionsfehler innerhalb von y Millisekunden
- Drehzahltoleranz von x % gemessen gegenüber y Abtastungen
- Es ist vielmehr wichtig sich auf die Aspekte zu konzentrieren, die die Maschine mit zuverlässiger Leistung in die Produktion bringen. Diese Aspekte basieren auf einem grundlegenden Verständnis des Systems.
Nach der Erstellung detaillierter Servo-Leistungsdaten können Sie mit dem Tuning Ihres Systems beginnen.
Vor dem Tuning
Wenn im schlimmsten Fall während der Abstimmung ein Fehler auftritt, kann der Servomotor heftig durchdrehen. Daher müssen Sie sicherstellen, dass das System mit einem durchdrehenden Servomotor umgehen kann. Der Servoverstärker verfügt über verschiedene Funktionen, einen durchdrehenden Servomotor sicherer zu machen:
- Stellen Sie sicher, dass die Endschalter den Servoverstärker abschalten, wenn sie auslösen. Wenn ein vollständiges Durchdrehen auftritt, kann der Motor sehr schnell einen Endschalter erreichen.
- Stellen Sie sicher, dass die maximale Motorgeschwindigkeit genau eingestellt ist. Wenn ein vollständiges Durchdrehen auftritt, kann der Motor schnell die Maximalgeschwindigkeit erreichen, und der Servoverstärker wird dann deaktiviert.
Tuning-Methoden für geschlossene Regelkreise
Die geschlossene Regelkreissteuerung ist für die gewünschte Position bzw. Geschwindigkeit (Trajektorie) des Motors und Anlegen des geeigneten Stroms am Motor verantwortlich, um diese Trajektorie zu erreichen. Die Herausforderungen bei geschlossenen Regelkreissteuerungen liegt darin, sicherzustellen, dass das System nicht nur der gewünschten Trajektorie folgt, sondern in allen Bedingungen stabil bleibt und externen Kräften widersteht - und all diese Bedingungen müssen gleichzeitig erfüllt werden.
In der Betriebsart Geschwindigkeit wird nur der Geschwindigkeitsregelkreis abgestimmt. In der Betriebsart Positionsbetriebsart müssen sowohl der Geschwindigkeits- als auch der Positionsregelkreis abgestimmt werden.
Tuning des Geschwindigkeitsregelkreises
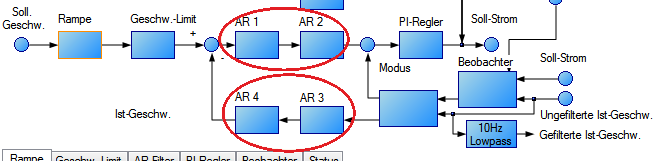
Der Geschwindigkeitsregelkreis im AKD besteht aus einem PI (Proportional-/Integralregler), der in Reihe mit zwei Anti-Resonanzfiltern (ARF) im Vorwärtspfad geschaltet ist, und zwei Anti-Resonanzfilter, die in Reihe im Rückführungspfad geschaltet sind.
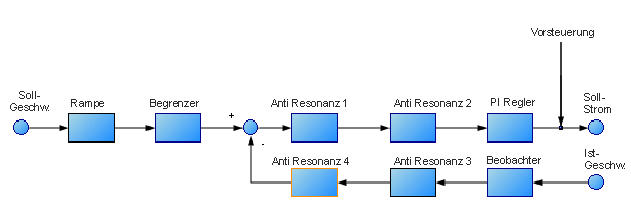
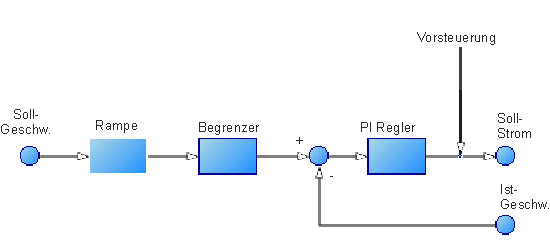
Für ein grundlegendes Tuning des Geschwindigkeitsregelkreises können Sie den PI-Block nutzen und ARF1 sowie ARF2 auf Eins (ohne Wirkung) und den Beobachter auf 0 (ohne Wirkung) setzen. Wenn Sie nur den PI-Block verwenden, wird das Tuning des Geschwindigkeitsregelkreises vereinfacht. Zum Starten des Tuning können Sie zuerst den PI Controller-Block einstellen. Ein vereinfachter Geschwindigkeitsregelkreis ohne Anti-Resonanzfilter und Beobachter ist nachstehend abgebildet. Auf diese Weise können Sie sich den Regelkreis vorstellen, bevor die Anti-Resonanzfilter und der Beobachter verwendet werden.
Verfahren zum einfachen Tuning eines Geschwindigkeitsregelkreises:
- Stellen Sie DRV.OPMODE gemäß Ihrer Anwendung auf Geschwindigkeit oder Position ein. Wenn DRV.OPMODE auf Position gesetzt wird, stellen Sie VL.KVFF auf 1,0 ein.
- Setzen Sie VL.KP auf 0.
- Setzen Sie VL.KI auf 0.
- Wählen Sie für die Service-Fahrt eine Bewegung, die den Bewegungsgeschwindigkeiten in der realen Anwendung entspricht. Um ein sicheres Überschießen während des Tuning zu ermöglichen, sollten Sie die Service-Fahrt nicht auf eine Geschwindigkeit über ½ der maximalen Motorgeschwindigkeit einstellen. Stellen Sie die Beschleunigung auf einen für Ihre Anwendung geeigneten Wert ein. Stellen Sie die Service-Fahrt auf eine Laufrichtungsänderung ein. Setzen Sie „Zeit1“und „Zeit2“auf das Dreifache der erwarteten Stabilisierungszeit für das System. 1,0 Sekunden ist ein angemessener Wert für Zeit1 und Zeit2, wenn Sie die erwartete Stabilisierungszeit nicht kennen.
- Aktivieren Sie den Servoverstärker und starten Sie die Service-Fahrt. Es sollte keine Bewegung feststellbar sein, da an diesem Punkt keine Einstellungsverstärkungen des Geschwindigkeitsregelkreises vorliegen.
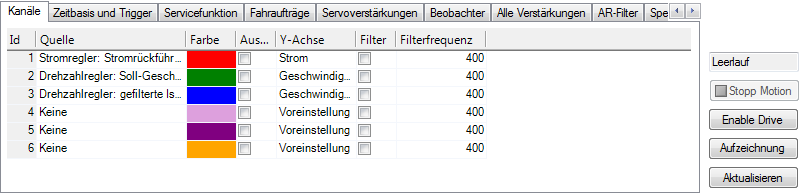
- Wenn Sie VL.KP und VL.KI einstellen, zeichnen Sie darunter VL.FB und VL.CMD auf. Diese Kurven werden benötigt, um die Leistung des Drehzahlreglers zu beurteilen.
- Einstellen von VL.KP: Erhöhen Sie VL.KP kontinuierlich um den Faktor 2, bis:
- ein Geräusch im System ertönt (Summen, Brummen o.ä.) oder
- ein Überschießen der Geschwindigkeit sichtbar wird. Bei ausschließlicher Verwendung von VL.KP sollte kein Überschießen der Geschwindigkeit feststellbar sein.
- Wenn Sie einen der obigen Grenzwerte erreichen, reduzieren Sie VL.KP auf einen Wert, bei dem keine unerwünschten Geräusche bzw. kein Überschießen feststellbar sind.
- Einstellen von VL.KI: Erhöhen Sie VL.KI kontinuierlich um den Faktor 1,5 bis:
- unerwünschte Geräusche oder Rütteln des Systems feststellbar sind.
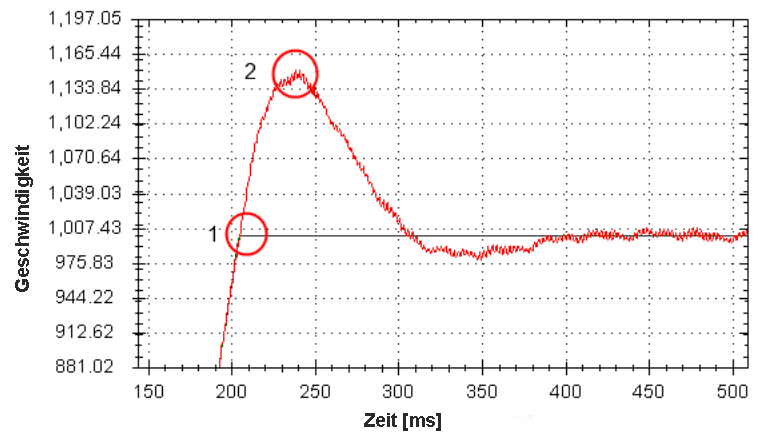
- Siehe > 15 % Überschießen
- Das nachstehende Beispiel zeigt ein Überschießen um 15 %. Dies ist eine gezoomte Service-Fahrt mit einer Solldrehzahl von 1000 U/Min (Position 1), bei der das Überschießen mit einer Spitze von 1150 U/Min auftritt (Position 2).
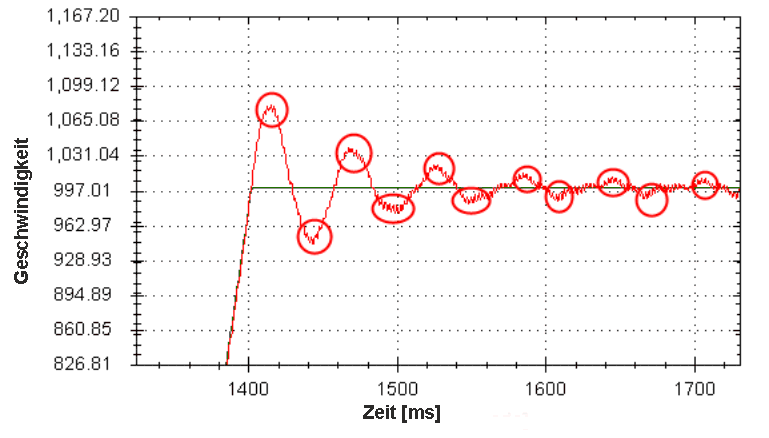
- Das nachstehende Beispiel zeigt 11 Überschießpunkte. Jeder Überschießpunkt ist mit einen roten Kreis gekennzeichnet.
- Wenn Sie einen der obigen Grenzwerte erreichen, reduzieren Sie VL.KI auf einen Wert, bei dem keine unerwünschten Geräusche bzw. kein Überschießen feststellbar sind.
- Stoppen Sie die Service-Fahrt.
Tuning des Positionsregelkreises
Der Positionsregelkreis ist der zweite Regelkreis, der einen korrekt eingestellten Geschwindigkeitsregelkreis benötigt, um eine genaue Kontrolle der Position zu ermöglichen. Der Positionsregelkreis ist ein einfaches, aus einem PI-Regelkreis bestehendes Element. Am einfachsten ist es, den P- und I-Ausdruck im Geschwindigkeitsregelkreis einzustellen und nur den P-Ausdruck im Positionsregelkreis zu verwenden.
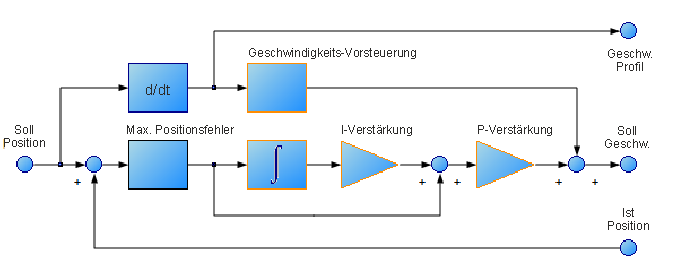
Verwenden Sie maximal drei P- und I-Ausdrücke ungleich Null aus dem Geschwindigkeits- und dem Positionsregelkreis. Eine Kombination wäre VL.KP, VL.KI und PL.KP. Eine andere gültige Kombination wäre VL.KP, PL.KP und PL.KI. Die Kombination VL.KP, VL.KI und PL.KP ist nachstehend dargestellt.
Verfahren zum Tuning eines Positionsregelkreises:
- Setzen Sie VL.KVFF auf 1.
- Erhöhen Sie PL.KP, bis:
- Sie 25 % Überschießen sehen oder
- Sie mehr als 3 Überschießer sehen oder
- Sie unerwünschte Geräusche vom System wahrnehmen.
- Wenn Sie einen der obigen Grenzwerte erreichen, reduzieren Sie PL.KP auf einen Wert, bei dem keine unerwünschten Geräusche bzw. kein Überschießen feststellbar sind.
Methoden zum Tuning der Drehmoment-Vorsteuerung
Die drehmomentbasierten Vorsteuerung im AKD bewirkt eine effektive Modellierung der physikalischen Eigenschaften Ihres Motors und ermöglicht es dem Servoverstärker, den geeigneten Strom zu liefern, auch wenn das Feedback noch keine Daten an den Servoverstärker zu senden. Mit drehmomentbasierten Vorsteuerung können Sie den Schleppfehler praktisch ohne Einbußen bei der Stabilität senken.
Formbasiertes Tuning der Vorsteuerung
Zur Einstellung von IL.KAFF:
- Stellen Sie VL.KP und VL.KI wie oben im Abschnitt zum Tuning des Geschwindigkeitsregelkreises beschrieben ein. Setzen Sie DRV.OPMODE auf die Drehzahl (oder setzen Sie PL.KP und PL.KI auf 0 und VL.KVFF auf 1).
- Konfigurieren Sei eine kurze, wiederholbare Service-Fahrt mit Beschleunigungen, die repräsentativ für die Bewegungen in Ihrer Anwendung sind. (Genaue Werte für die Beschleunigung sind nicht entscheidend.)
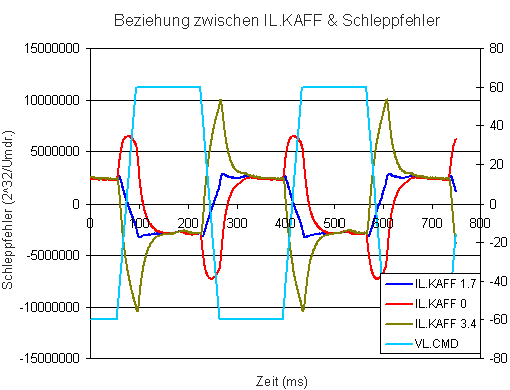
- Erhöhen Sie IL.KAFF, bis der Positionsfehler (PL.ERR) proportional zum invertierten Drehzahlbefehl ist. Die Anpassung von IL.KAFF konzentriert sich darauf, Unebenheiten in der Beschleunigung und Verzögerung zu entfernen. In der nachfolgenden Abbildung wurde der ideale Wert von 1,7 für IL.KAFF verwendet.
Verwendung von Anti-Resonanzfiltern
Der AKD verfügt über vier Anti-Resonanzfilter. Zwei Filter befinden sich im Vorwärtspfad, die beiden anderen im Rückführungspfad.
Gemeinsamkeiten
- Beide Filterarten werden prinzipiell zur Verbesserung der Stabilität und Leistung des Systems eingesetzt.
Unterschiede
- Die Filter im Vorwärtspfad führen zu einer höheren Phasennacheilung im Systemansprechverhalten des geschlossenen Regelkreises.
- Filter im Vorwärtspfad begrenzen das Spektrum, das den Motor erreicht / Filter im Rückführungspfad filtern die Rückführung, nachdem sie dem Motor zugeführt wurde.
Arten von Anti-Resonanzfiltern
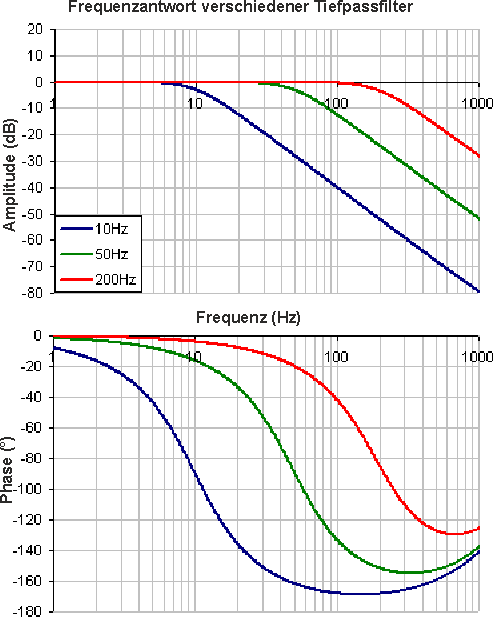
Tiefpass
Ein Tiefpass-Filter lässt Signale unterhalb einer Eckfrequenz passieren und dämpft Signale oberhalb dieser Eckfrequenz. Das Verhalten der Eckfrequenz kann mit dem Tiefpass-Q festgelegt werden.
Um einen Tiefpass-Filter festzulegen, müssen Sie die Frequenz und Q sowohl für den Nullpunkt als auch den Pol von Anti-Resonanzfilter 1 bestimmen. Dies wird mit dem nachstehenden Beispiel verdeutlicht, in dem die Terminal-Befehle folgende Einstellungen definieren:
- Filtertyp = BiQuad
- Nullfrequenz = 700 Hz (dies ist die Grenzfrequenz des Tiefpass-Filters)
- Null-Q = 0,707
- Polfrequenz = 5000 Hz
- Pol-Q = 0,707
VL.ARTYPE1 0
VL.ARZF1 700
VL.ARZQ1 0,707
VL.ARPF1 5000
VL.ARPQ1 0,707
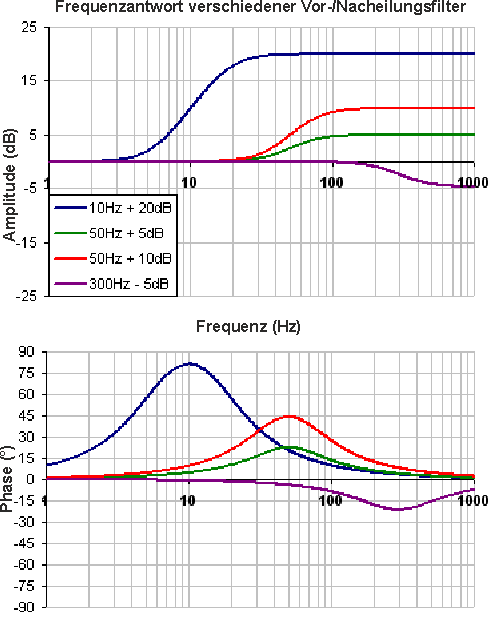
Vor-/Nacheilung
Ein Vor-/Nacheilungsfilter ist ein Filter mit einer Verstärkung von 0 dB bei niedrigen Frequenzen und einer Verstärkung, die Sie für hohe Frequenzen festgelegt haben. Außerdem legen Sie die Frequenz für die Verstärkung fest, bei der der Übergang stattfindet.
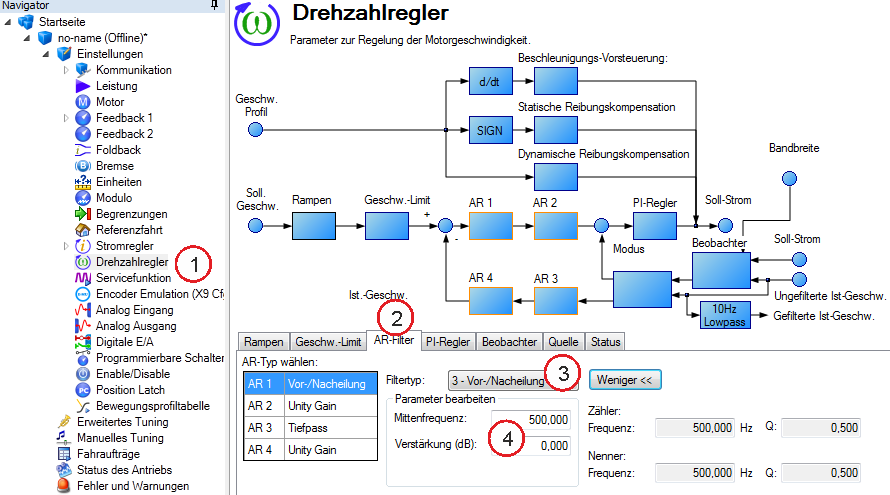
Zur Festlegung eines Vor-/Nacheilungsfilters müssen Sie die Mittenfrequenz und eine Hochfrequenzverstärkung (dB) bestimmen. Klicken Sie hierzu auf den Geschwindigkeitsregelkreis, wie im nachstehenden Beispiel gezeigt:
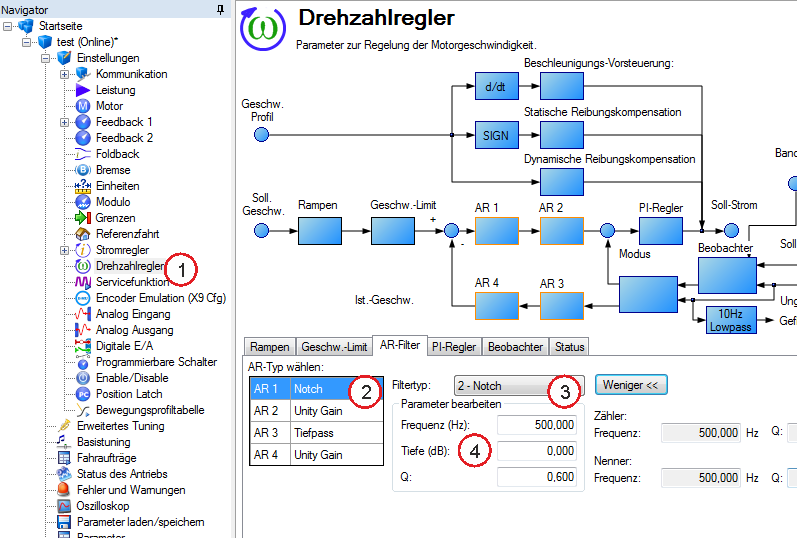
„Geschwindigkeitsregelkreis“(1), wählen Sie dann die Registerkarte „AR1“(2). Im Dropdown-Feld „Filtertyp“wählen Sie „Vor-/Nacheilung“(3) und geben schließlich die gewünschte Mittenfrequenz und die Verstärkung des Vor-/Nacheilungsfilters (4) ein.
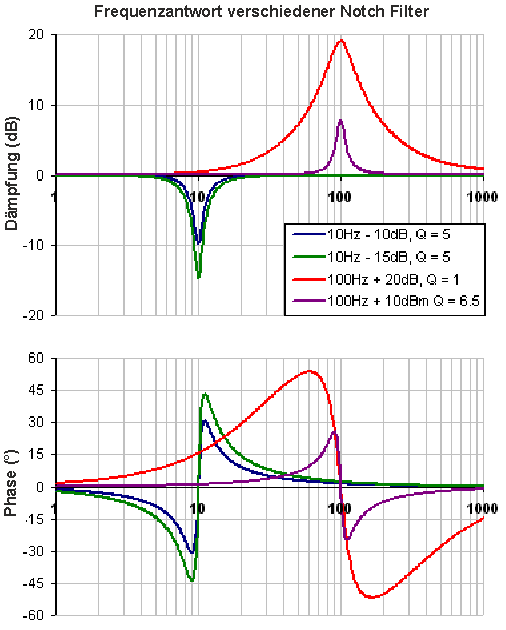
Notch
Ein Notch-Filter ändert die Verstärkung bei einer spezifischen Frequenz. Sie können die Frequenz festlegen, bei der die Verstärkung geändert wird (Frequenz (Hz)), die Breite des Frequenzbereichs bestimmen, bei dem der Einschnitt stattfindet (Q), und definieren, um wie viel sich die Verstärkung ändert (Notch-Tiefe (dB)).
Zur Festlegung eines Notch-Filters müssen Sie die Frequenz (Hz), Tiefe (dB) und Breite (Q) des Notch bestimmen. Klicken Sie hierzu auf den Geschwindigkeitsregelkreis, wie im nachstehenden Beispiel gezeigt:
Klicken Sie auf „Geschwindigkeitsregelkreis“(1), wählen Sie dann die Registerkarte „AR1“(2). Im Dropdown-Feld „Filtertyp“wählen Sie „Notch“(3) und geben schließlich die gewünschte Frequenz, Tiefe und den Q-Wert des Notch-Filters (4) ein.
BiQuad
Ein BiQuad ist ein flexibler Filter, der quasi aus zwei einfacheren Filtern besteht, dem Nullpunkt (Zähler) und dem Pol (Nenner). Tatsächlich sind die oben erwähnten, vordefinierten Filter lediglich Sonderfälle des BiQuad.
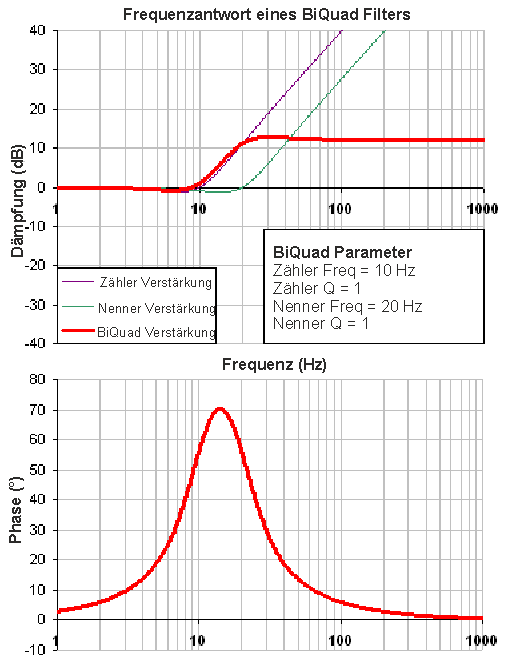
Sowohl der Nullpunkt (Zähler) als auch der Pol (Nenner) zeigen ein flaches Frequenzverhalten bei niedrigen Frequenzen und ein ansteigendes bei hohen Frequenzen. Die Übergangsfrequenz und die Dämpfung müssen sowohl für den Zähler als auch für den Nenner festgelegt werden.
Mit Hilfe der Analyse des Zählers und des Nenners ist die Berechnung des Frequenzverhaltens einfach:
Wenn Zähler und Nenner in dB dargestellt werden, ist das Ansprechverhalten des BiQuad Zähler – Nenner. Das Verständnis der Funktionsweise von Zähler und Nenner ist entscheidend, um die Erzeugung des Frequenzverhaltens eines BiQuad verstehen zu können.
Das nachstehende Beispiel zeigt einen BiQuad-Filter, der dem Filtertyp „Vor-/Nacheilung“ ähnlich ist. Zum besseren Verständnis der Bestimmung des Frequenzverhaltens des BiQuad wurde das Ansprechverhalten von Zähler und Nenner dargestellt. Wird der Nenner vom Zähler subtrahiert, ist das Ergebnis das BiQuad-Ansprechverhalten.
Der BiQuad Filter ist sehr flexibel, dies erlaubt die Definition von kundenspezifischen Filtern. Unten ist ein Beispiel für einen Resonanzfilter, der einen BiQuad Filter nutzt, dargestellt. Beachten Sie, wie die hohen Q Werte den Zähler und Nenner beeinflussen. Dadurch ergibt sich ein Frequenzverhalten des BiQuad, das einer mechanischen Resonanz ähnlich ist.
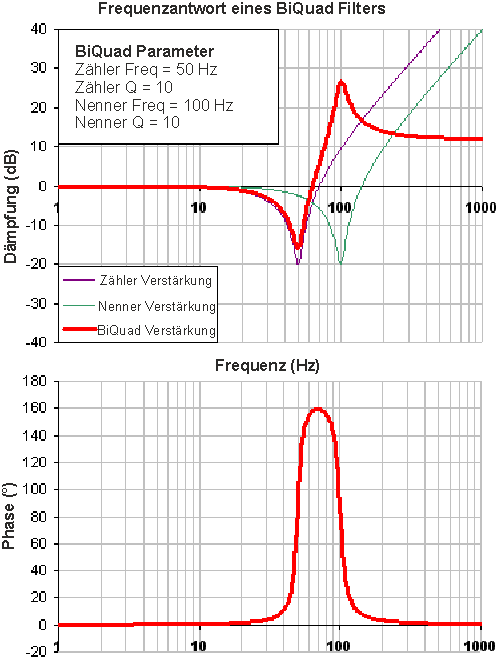
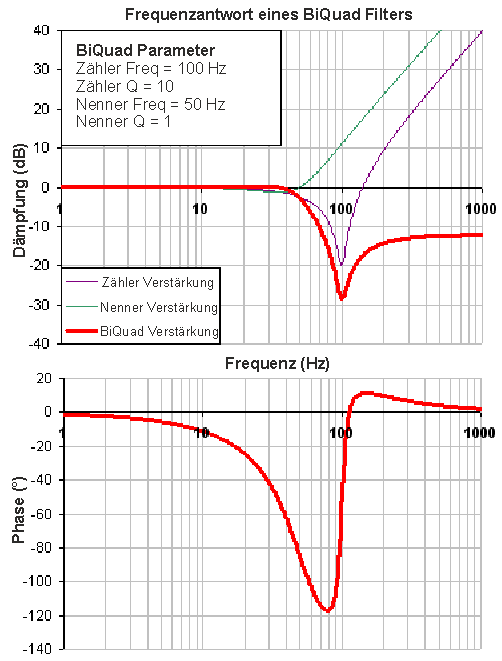
In den beiden obigen Beispielen wird eine Zählerfrequenz verwendet, die niedriger als die Nennerfrequenz ist.Hieraus ergibt sich eine positive Verstärkung bei hohen Frequenzen. Wenn die Nennerfrequenz niedriger ist als die Zählerfrequenz, dann haben hohe Frequenzen eine negative Verstärkung.
Im Beispiel unten ist die Zählerfrequenz größer als der Nenner. Beachten Sie, dass die hohe Frequenz eine negative Verstärkung hat.
Um einen BiQuad-Filter festzulegen, müssen Sie die Frequenz und Q sowohl für den Nullpunkt als auch den Pol von Anti-Resonanzfilter 3 bestimmen. Dies wird mit dem nachstehenden Beispiel verdeutlicht, in dem die Terminal-Befehle folgende Einstellungen definieren:
- Filtertyp = BiQuad
- Nullfrequenz = 100 Hz
- Null-Q = 0,7
- Polfrequenz = 1.000 Hz
- Pol-Q = 0,8
VL.ARTYPE3 0
VL.ARZF3 100
VL.ARZQ3 0,7
VL.ARPF3 1000
VL.ARPQ3 0,8
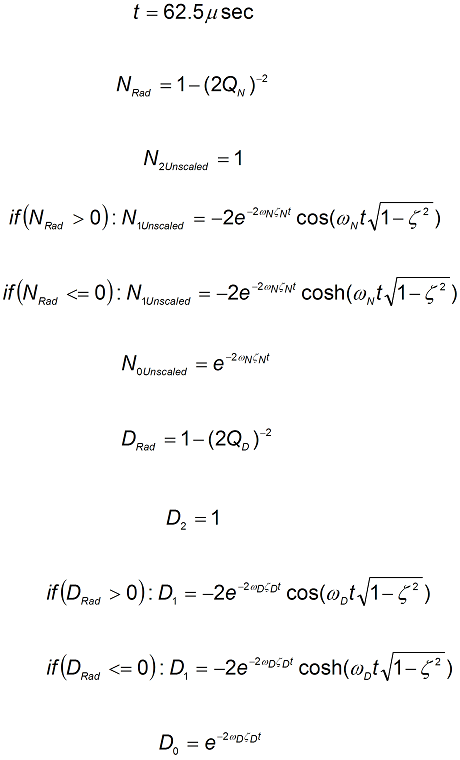
BiQuad-Berechnungen
Im S-Bereich wird das lineare BiQuad-Ansprechverhalten berechnet:

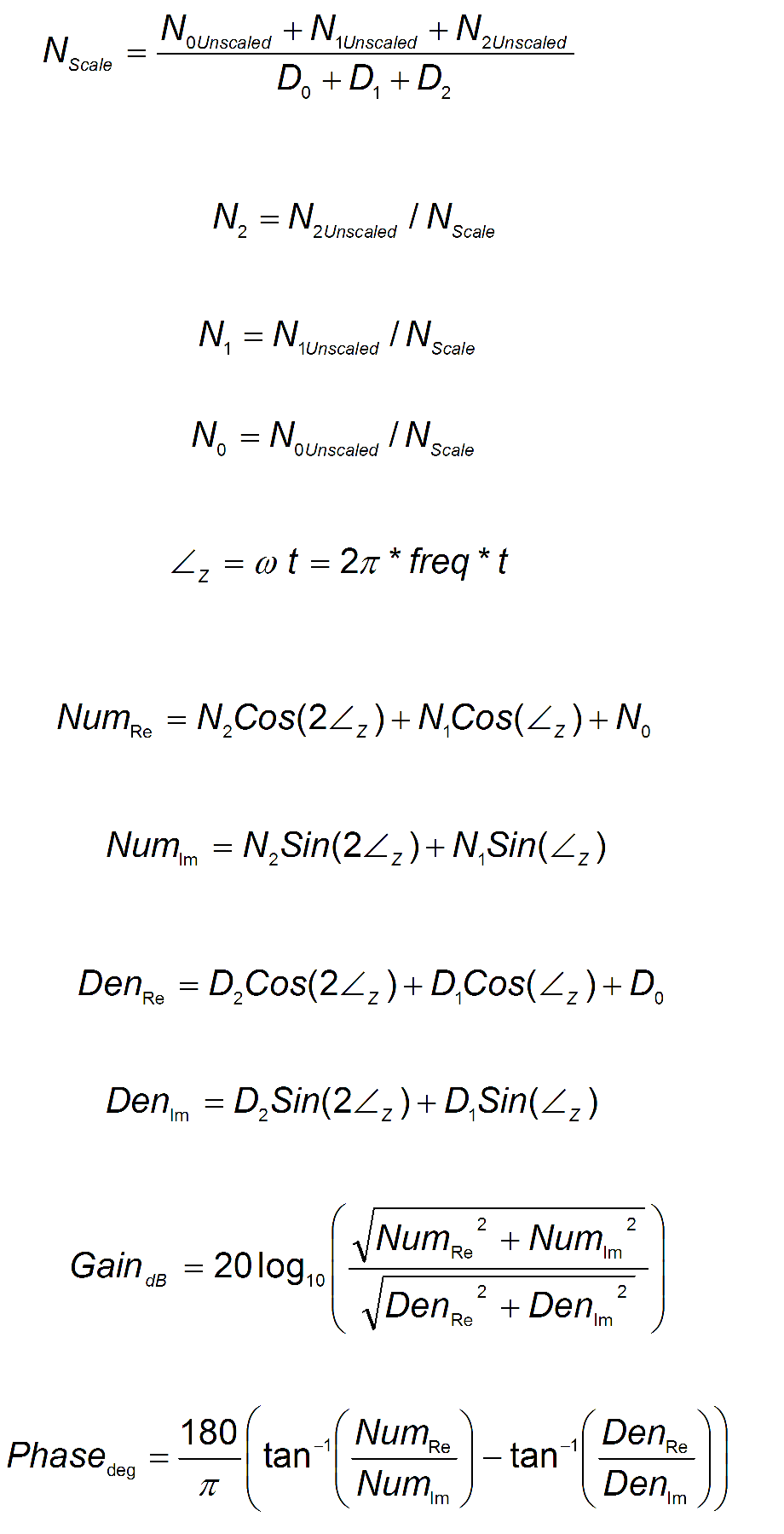
Für die Umsetzung eines idealisierten S-Bereichsverhaltens in ein realistischeres Z-Bereichsverhalten kann eine Pol-Null-Transformation verwendet werden. Berechnung des Frequenzverhaltens für eine einzelne Frequenz:
Gängige Einsatzmöglichkeiten von Anti-Resonanzfiltern
Tiefpass Filter im Rückführungspfad. Dies ist eine häufig verwendete Methode, um mit Rückführungssensoren mit starkem Rauschen umzugehen. Wenn dieser Filter zusammen mit Rückführungssensoren mit starkem Rauschen eingesetzt wird, lässt sich eine erhebliche Reduzierung des wahrnehmbaren Rauschens erzielen.
Vor-/Nacheilungsfilter im Vorwärtspfad. Dies ist eine häufig verwendete Methode, um eine Phasenvoreilung für Regelkreise ohne Erregung von hohen Frequenzresonanzen zu erreichen.
Tiefpass Filter im Vorwärtspfad. Dies ist eine häufig verwendete Methode, um zu verhindern, dass die Hochfrequenzenergie ein System erreicht, das die Energie dieser hohen Frequenzen nicht produktiv nutzen kann. Diese Methode dient auch dazu, die Wirkung der Systemresonanzen über einen großen Frequenzbereich zu dämpfen.
Notch Filter werden zur Ausschaltung von Systemresonanzen benutzt. Notch-Filter fungieren als entgegengesetzte Amplitude der Systemresonanzen. Notch-Filter werden auf sehr speziellen Frequenzen angewandt. Daher müssen Sie die Resonanzfrequenzen Ihres Systems genau kennen, um sie effektiv nutzen zu können.







