Auswählen und Speichern von Einheiten
Der Servoverstärker verwendet drei Hauptgrößen zur Bewegungsmessung: Position, Geschwindigkeit und Beschleunigung. Sie müssen zunächst die Maßeinheiten für diese Größen wählen und anschließend die Details der Mechanik eingeben, um die gewählten Einheiten korrekt zu skalieren.
Die Einstellungen für Einheiten werden automatisch übernommen. Die Einstellungen für Einheiten im Servoverstärker entsprechen den letzten Einstellungen, die vor dem Beenden durchgeführt wurden. Um Einstellungen im nichtflüchtigen Speicher des Servoverstärkers abzulegen, klicken Sie in der Symbolleiste auf In Verstärker speichern.
Beispiel
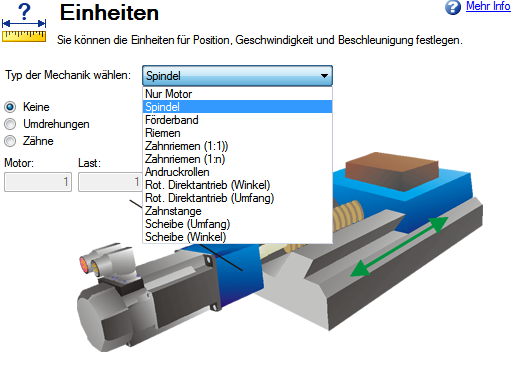
1. Wahl des Mechaniktyps
Zur Einstellung der Einheiten für eine bestimmte Anwendung im Servoverstärker müssen Sie zunächst den Typ der vorhandenen Mechanik wählen.
2. Wahl der Positionseinheiten
Standardmäßig wird die Position in Counts (Schritten) gemessen. Counts sind die kleinsten im Servoverstärker darstellbare Positionseinheiten. Diese Maßeinheit entspricht 4.294.967.296 Schritten/Umdrehung des Motors. Sie können Sie den Einheiten-Bildschirm verwenden, um diese Maßeinheit in Bezug auf die vorliegende Anwendung sinnvoll zu skalieren.
Für Positionseinheiten sind fünf Optionen verfügbar:
0 –Counts (4.294.967.296/Umdrehung)
1 –Radiant (2*π /Umdrehung)
2 –Grad (360/Umdrehung)
3 – Benutzerspezifisch (je nach Mechanik vom Benutzer eingestellt)
4 –Counts (16 Bit) (65.536 /Umdrehung)
Der Servoverstärker verwendet unabhängig von den Einstellungen für die Einheiten eine volle 32-Bit-Quantisierung für interne Berechnungen. Benutzerspezifische Einstellungen für die Einheiten haben keine Auswirkungen auf die Leistung, Auflösung oder Genauigkeit des Servosystems.
Wählen Sie „3-Kundenspezifisch“ and anschließend die gewünschten Positionseinheiten, z. B. Millimeter.
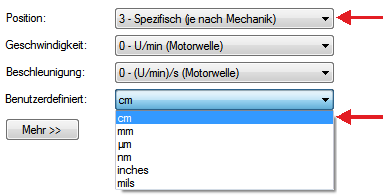
3. Wahl der Geschwindigkeitseinheiten
Wählen Sie für die Geschwindigkeit Kundenspezifisch/s, um die Messung auf mm/s einzustellen.
4. Wahl der Beschleunigungseinheiten
Wählen Sie für die Beschleunigung Kundenspezifisch/s^2, um die Messung auf mm/s2 einzustellen.
Nach erfolgter Festlegung der gewünschten Maßeinheiten müssen Sie die Details der Mechanik eingeben, um die Skalierung der gewählten Einheiten zu ermöglichen.
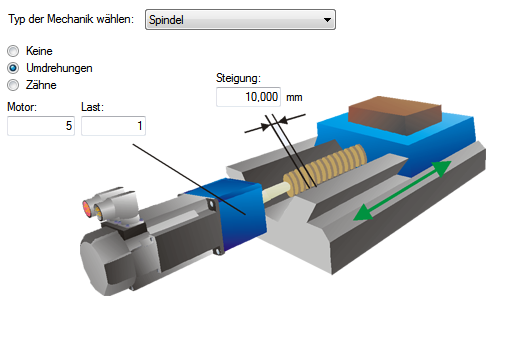
In diesem Beispiel wurde eine Leitspindel mit 10 mm Steigung und einem 5:1 Getriebe gewählt. Eine Steigung von 10 mm bedeutet, dass die Last bei jeder Umdrehung der Spindel 10 mm zurücklegt. Basierend auf den für die gewählte Mechanik eingegebenen Werten wird ein Skalierfaktor angewandt. Diese Skalierung erfolgt über die Parameter UNIT.PIN und UNIT.POUT im AKD, die bei Eingabe der mechanischen Werte automatisch eingestellt werden.
Sie können UNIT.PIN und UNIT.POUT direkt unter Nur Motor im Feld Typ der Mechanik wählen eingeben. In diesem Beispiel wird die Skalierung wie folgt angepasst:

UNIT.PIN wird wie folgt berechnet:
10 mm/Spindeldrehung * 1 Spindeldrehung/5 Motordrehungen = 2 mm/Motordrehung
Nutzereinheiten mit Feedback 2 nutzen
Wenn PL.FBSOURCE = 1 (Feedback 2) ist, sollten UNIT.PIN und UNIT.POUT den mechanischen Eigenschaften des Feedback 2 Encoders entsprechen.
Beispiel: ein Inkrementalgeber ist an X9 angeschlossen und als FB2 konfiguriert (Positionsrückführung in den Lageregelkreis). Der Encoder ist auf einer runden Scheibe mit 400mm Umfang montiert. Eine Umdrehung des Encoders soll 400mm entsprechen. In diesem Fall, setzen Sie UNIT.PIN auf 400 und UNIT.POUT auf 1.
Zugehörige Parameter







