









EtherCAT® and Safety over EtherCAT®
AKD2G drives (connectivity option E) can be connected as slaves to the EtherCAT® network (CoE) by using RJ45 connectors X11 (out port) and X12 (in port). The communication status is indicated by the built-in connector LEDs.
|
Connector |
Name |
Function |
|
|---|---|---|---|
|
|
X11 "Out" |
"ERR" |
Returns potentials communication failures: Off = No Error |
|
X11 "Out" |
Link/ |
On/Blinking: Physical link/Data Traffic on. |
|
|
X12 "In" |
"RUN" |
Returns the device state: Off = INIT |
|
|
X12 "In" |
Link/ |
On/Blinking: Physical link/Data Traffic on. |
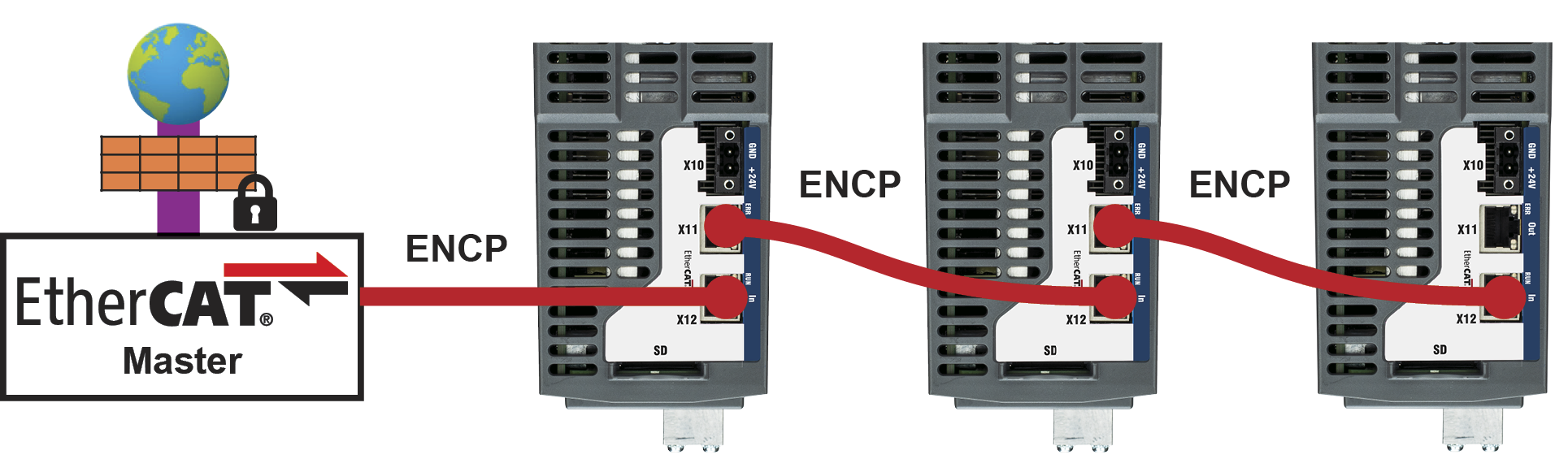
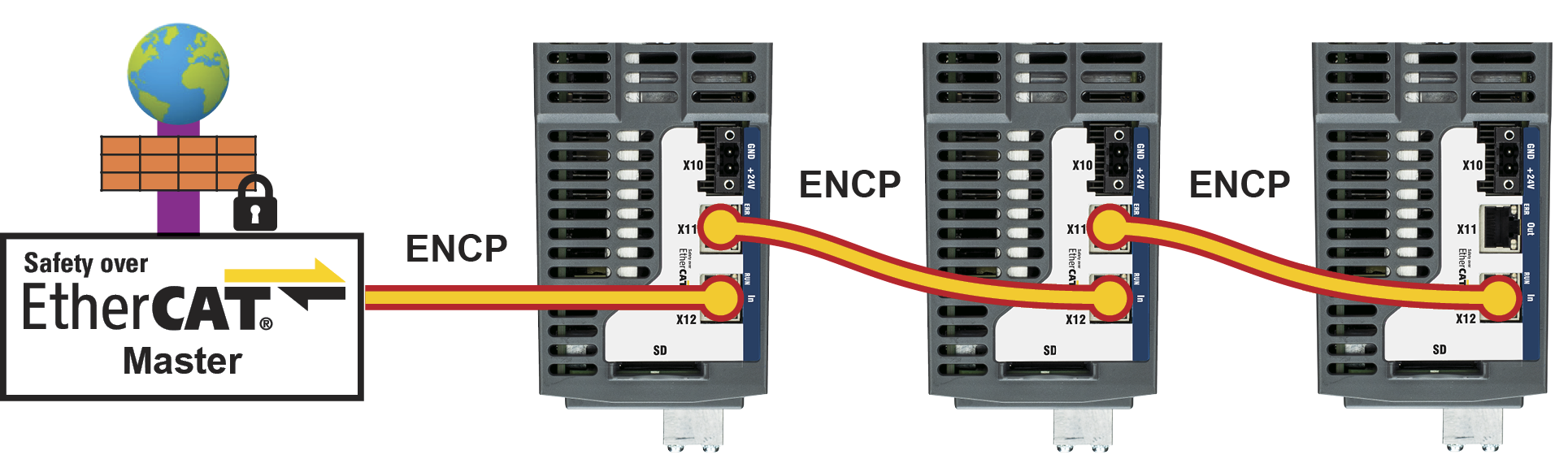
Bus topology example (EtherCAT®)
We suggest to use Kollmorgen ENCP cables.
Communication profile
For EtherCAT® communication profile description refer to the manual "AKD2G EtherCAT® Communication".






