Motion Smoothing
Motion Smoothing
Overview
The AKD2 includes a position filter that allows the user to smooth position command values from all sources:
- Internal trajectories (i.e. Motion Tasks, Service Motion)
- External trajectories (i.e. Fieldbus)
- Slave operation (i.e. Electronic Gearing, Analog motion)
Using this filter can overcome problems such as noise, quantization effects, or large discontinuities. The effect of the filter is not a perfect S-Curve, but achieves a similar result. By configuring the position loop pre-filter’s frequency (AXIS#.PL.FILTER.FREQ) and Q parameters (AXIS#.PL.FILTER.Q), the motion profile can be smoothed in a similar fashion. The filter becomes active when the filter frequency is set to a non-zero value.
Example
Motion Profile:
Position: 720 deg
Velocity: 240 RPM
Acceleration: 5,000 RPM/s
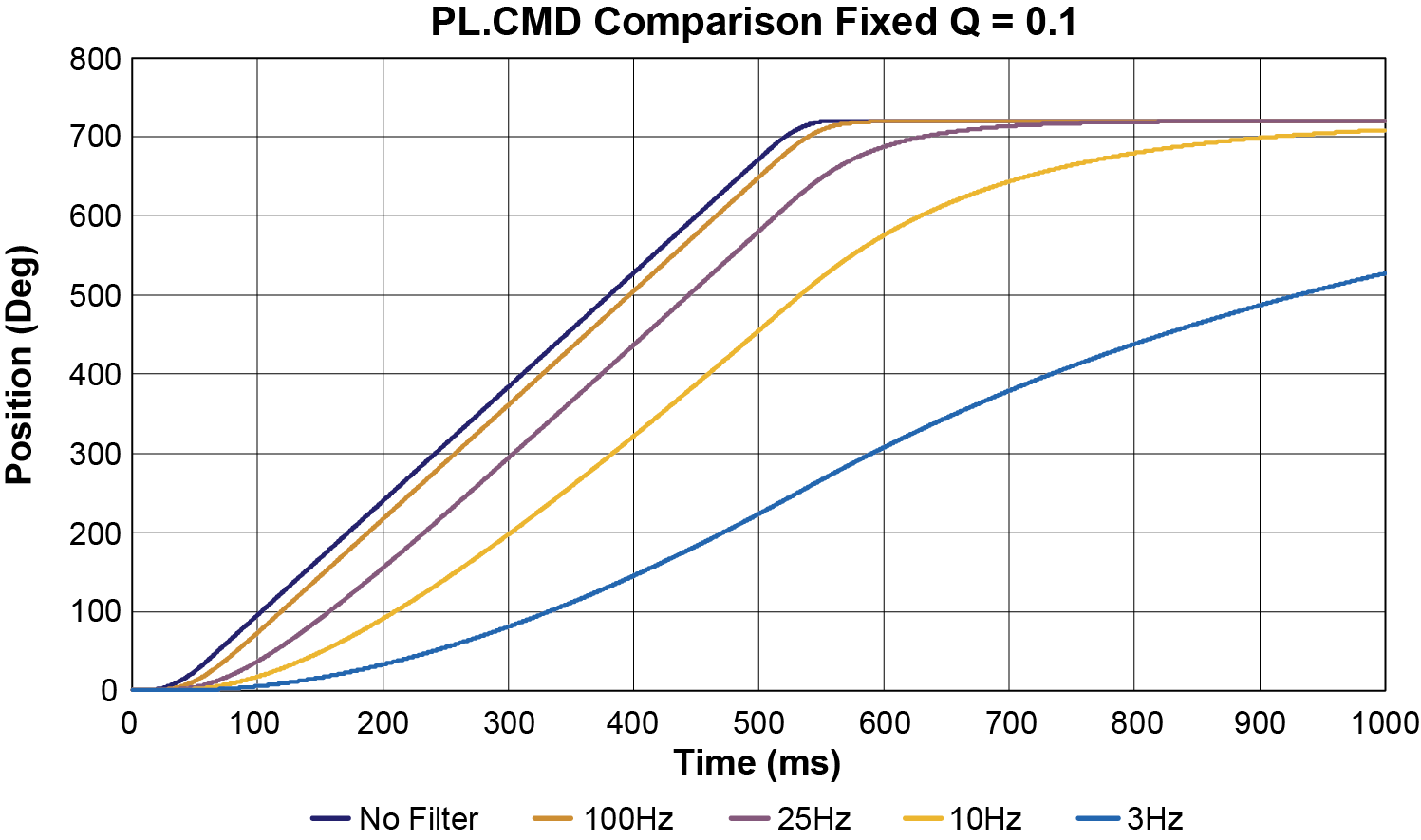
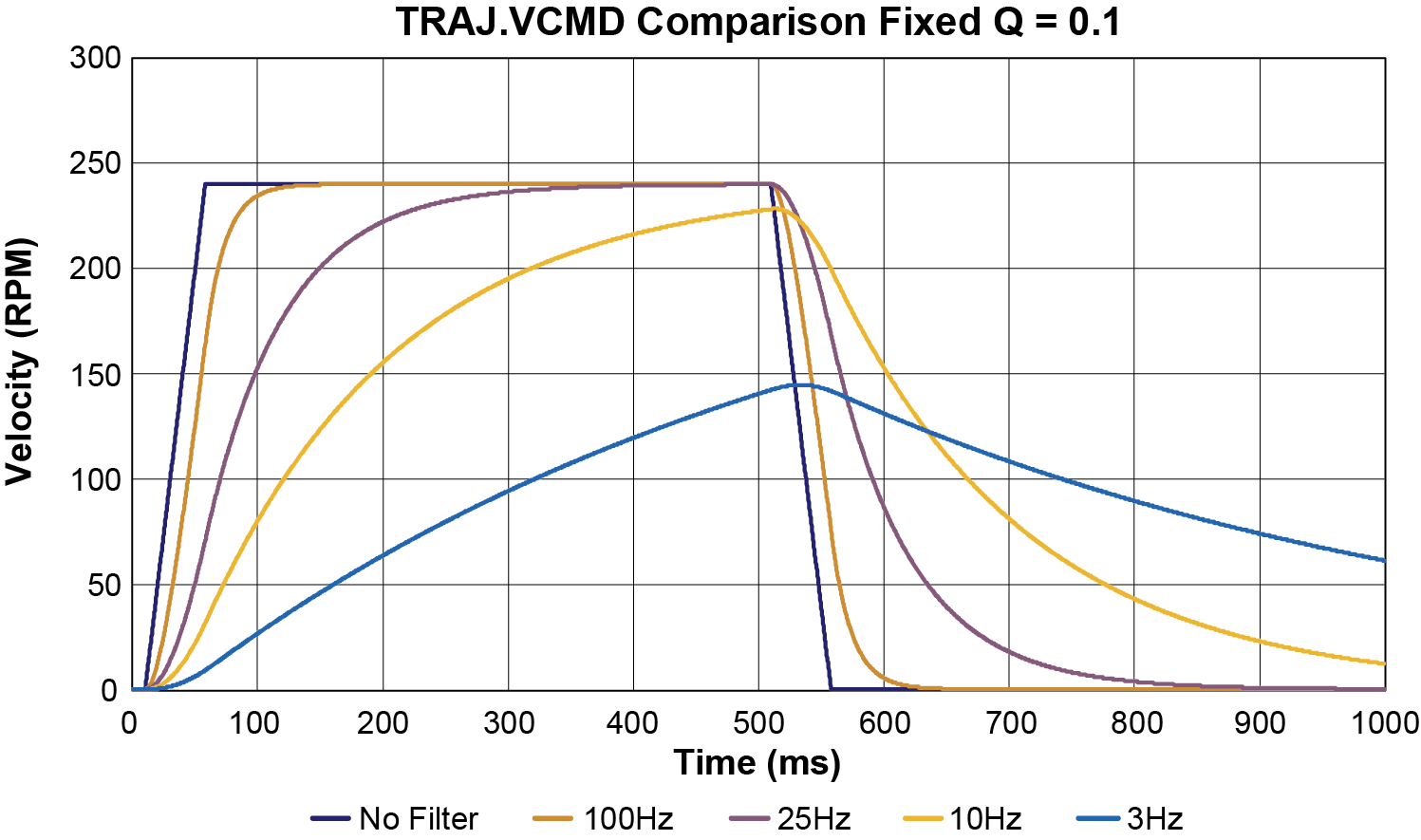
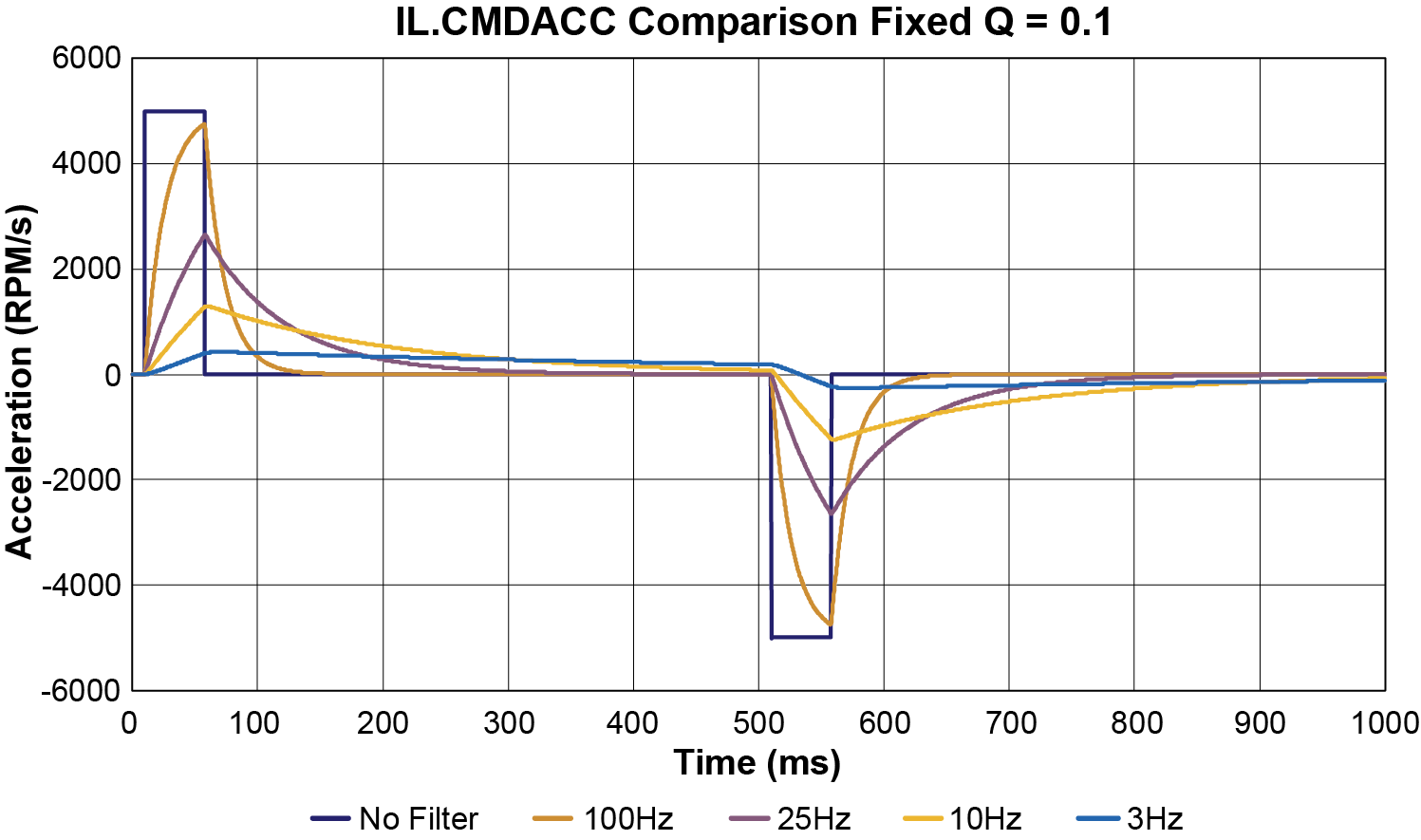
Below is a comparison of the resulting Trajectory based on various settings:
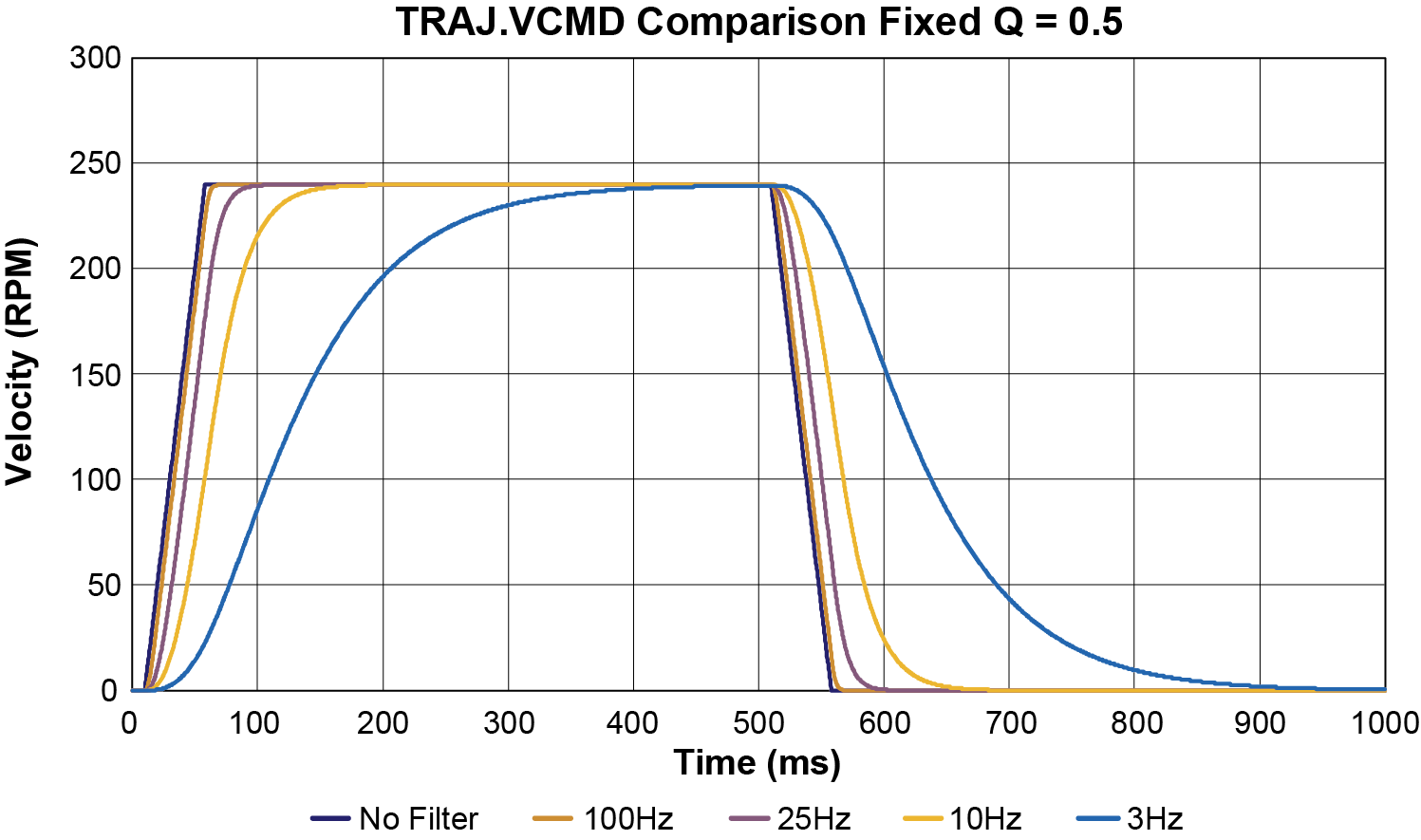
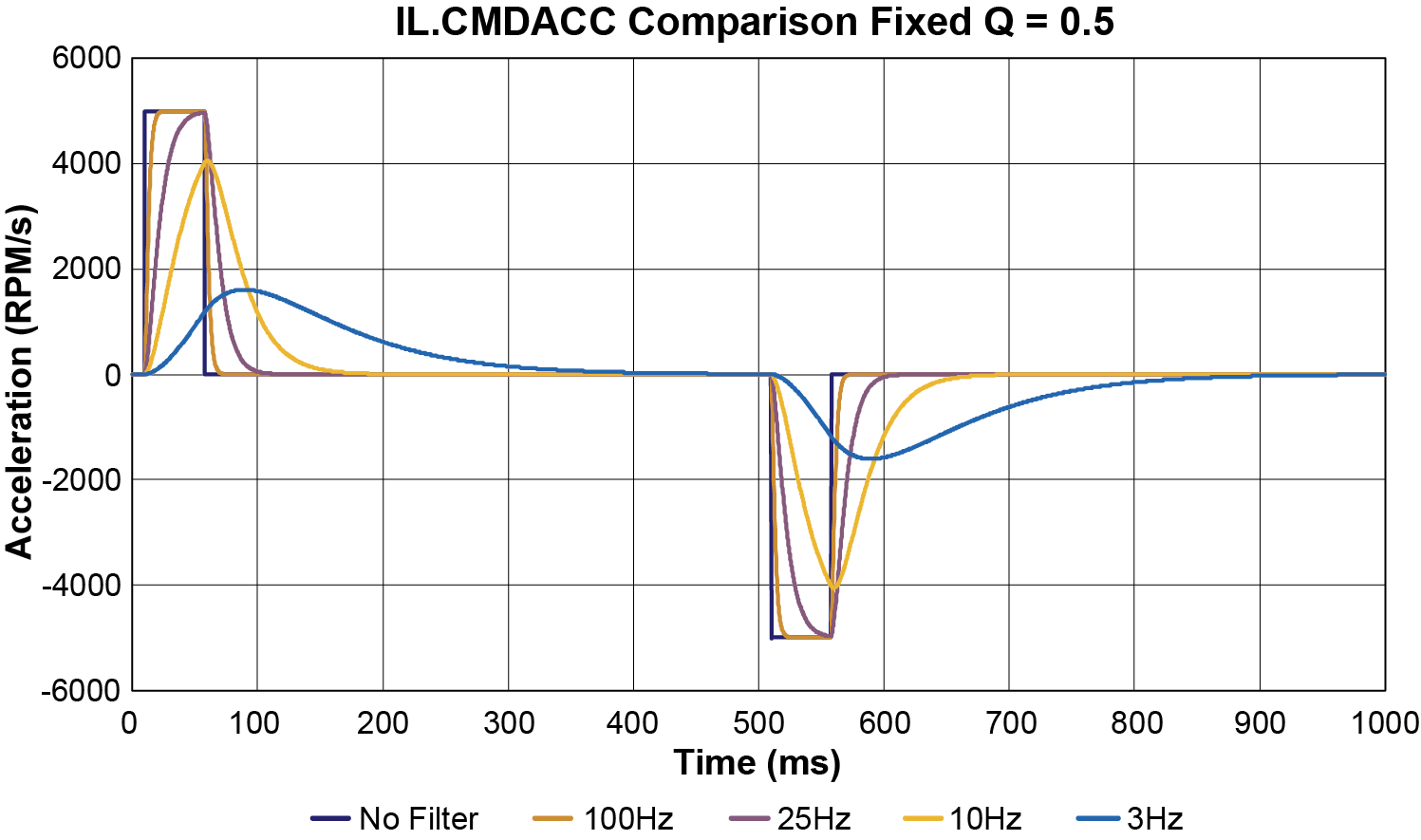
By turning on the position loop prefilter, the lower the filter frequency the more gentle the acceleration profile becomes. This in turn causes an S-Curve like behavior on the velocity profile and limits instantaneous torque accelerations on machine mechanics.
The “price” for using this is that your target position takes longer to settle. To compensate for this, the acceleration and velocity targets can be increased. Even after increasing Velocity and Acceleration you can significantly improve the motion profile with little effect on settling.
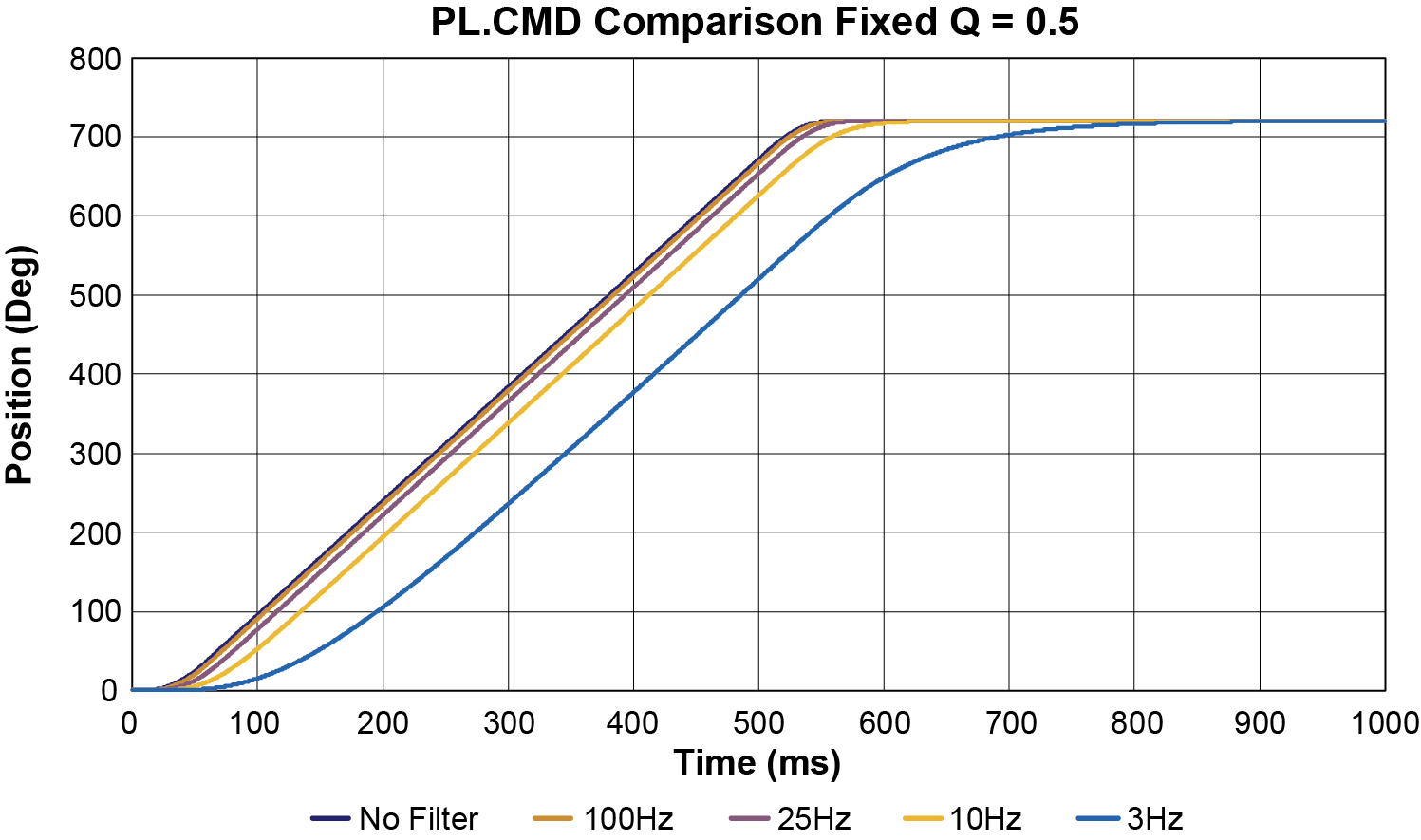
Additionally, the Q factor of the filter can be configured as well. See below for the effects of changing the Q, valid values for Q are 0.1 to 0.5 (default).