









PL.KP - Position Loop Proportional Gain
| Parameter | Description | Drive Keyword |
|---|---|---|
|
PL.KP |
Position Loop Proportional Gain |
|
|
VL.KI |
Velocity Loop Integral Gain |
|
|
VL.KP |
Velocity Loop Proportional Gain |
Review: The Controller [C] trace shows the frequency response of VL.KP, VL.KI, PL.KP, AR Filters 1 & 2
PL.KP is the Position Loop Proportional term, and its units is specified in rev²/s² (when divided, PL.KP / 2*PI gives you the bandwidth in Hz)
Note: VL.KP is set to 1.0 so that the gain of the system is at 0 dB. All other gains are zeroed

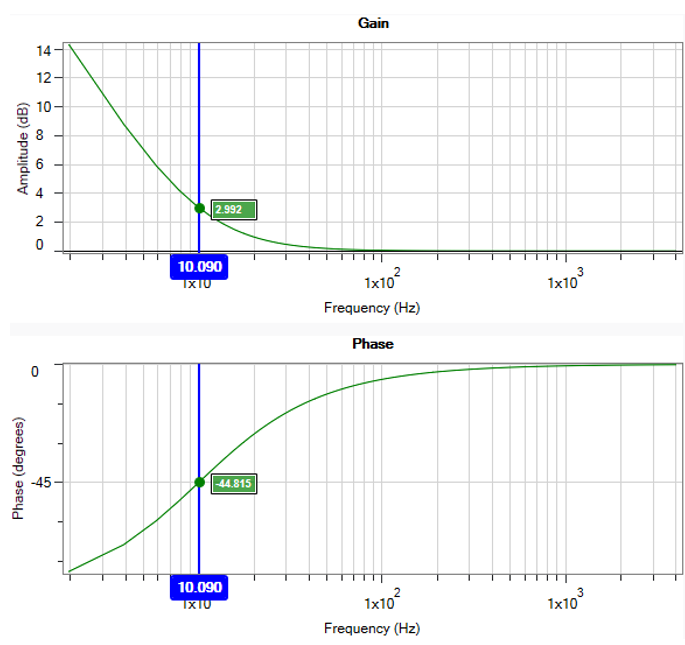
Below PL.KP is set to 10Hz
Note:
AKD2G: Units of PL.KP are Hz
AKD1: Units of PL.KP are rev²/s²
AKD1 Units = AKD2G * 2π
Just like VL.KI, PL.KP specifies the bandwidth of the proportional term. Where the gain is +3 dB at the PL.KP frequency
Note: Just like VL.KI, PL.KP ALWAYS decreases the phase of the system. The phase reduction is -45 deg at PL.KP Hz and -90 deg one decade earlier.
Although both VL.KI and PL.KP affect the frequency response the same, the behavior seen in the servo loop is much different.
Note: Higher values of VL.KI and PL.KP both reduce stability at low frequencies. Adjust them independently when trying to diagnose a problem.





