 Function Block - Performs a single-axis move to a specified endpoint position.
Function Block - Performs a single-axis move to a specified endpoint position.
-
-
- This function block starts a motion-related action and stores data for calculations and error checking.
- If using a dual-core controller, see Program a Multi-Core Controller.
Inputs
|
Input |
Data Type See Data Types. |
Range |
Unit |
Default |
Description |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
Execute |
BOOL |
FALSE, TRUE |
N/A |
No default |
On the rising edge, request to queue the move. |
||||||||||||
|
Axis |
AXIS_REF |
1 to 256 |
N/A |
No default |
Name of a declared instance of the AXIS_REF library function.
|
||||||||||||
|
Position |
LREAL |
See Description. |
User units |
No default |
Endpoint position.
|
||||||||||||
|
Velocity |
LREAL |
No range |
User units / sec |
No default |
Velocity setpoint. |
||||||||||||
|
Acceleration |
LREAL |
No range |
User units / sec2 |
No default |
|
||||||||||||
|
Deceleration |
LREAL |
No range |
User units / sec2 |
No default |
|
||||||||||||
|
Jerk |
LREAL |
No range |
User units / sec3 |
No default |
|
||||||||||||
|
Direction |
SINT |
0 to 4 |
N/A |
No default |
If the Position input is the same as the axis's current position, then:
|
||||||||||||
|
BufferMode |
SINT |
Enumerated |
N/A |
No default |
The specified buffer mode.
|
Outputs
|
Output |
Data Type See Data Types. |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
FALSE, TRUE |
N/A |
Indicates the move completed successfully. |
|
Busy |
BOOL |
FALSE, TRUE |
N/A |
High from the moment the Execute input goes high until the time the move is ended. |
|
Active |
BOOL |
FALSE, TRUE |
N/A |
Indicates this move is the Active move. |
|
CommandAborted |
BOOL |
FALSE, TRUE |
N/A |
If TRUE, the command was aborted by another function block. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Indicates either:
|
|
ErrorID |
INT |
No range |
N/A |
|
Remarks
Effects of Superimposed Moves on MC_MoveAbsolute
The axis parameter MC_AXIS_PARAM_APPLY_SUPERIMPOSED_DISTANCE (1033) affects how superimposed moves affect MC_MoveAbsolute.
- By default, MC_MoveAbsolute does not take into account any added superimposed distance due to MC_MoveSuperimp.
- When a MC_MoveAbsolue move completes, the final command position of the axis includes superimposed distances may not be equal to the Position input.
- To have MC_MoveAbsolute ignore superimposed distances and move the Position input, use MC_WriteBoolPar to set the value of the MC_AXIS_PARAM_APPLY_SUPERIMPOSED_DISTANCE axis parameter to TRUE.
- When MC_MoveAbsolute begins execution, the distance to move is calculated at that point in time.
- If a superimposed move is started while MC_MoveAbsolute is in progress, the final position of the axis when MC_MoveAbsolute completes is not equal to the Position input, regardless of the value of the MC_AXIS_PARAM_APPLY_SUPERIMPOSED_DISTANCE parameter.
- See Main about how this function is used in the Hole punch project.
Time Diagram
These images show two examples of the combination of two absolute move Function Blocks (FBs):
- The left part of the diagram illustrates when the second FB is called after the first one.
- If the first reaches the commanded position of 6000, and the velocity is 0 (zero), the output Done causes the second FB to move to the position 10000.
- The right part of the diagram illustrates when the second move FB starts the execution while the first FB is still executing.
- The first motion is interrupted and aborted by the Test signal during the constant velocity of the first FB.
- The second FB moves directly to the position 10000 although the position of 6000 is not yet reached.
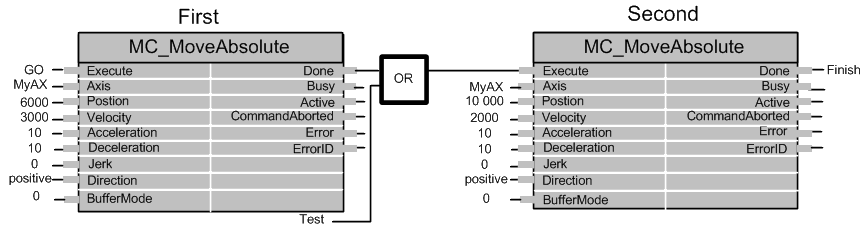
Figure 1: Time Diagrams: First and Second FBs
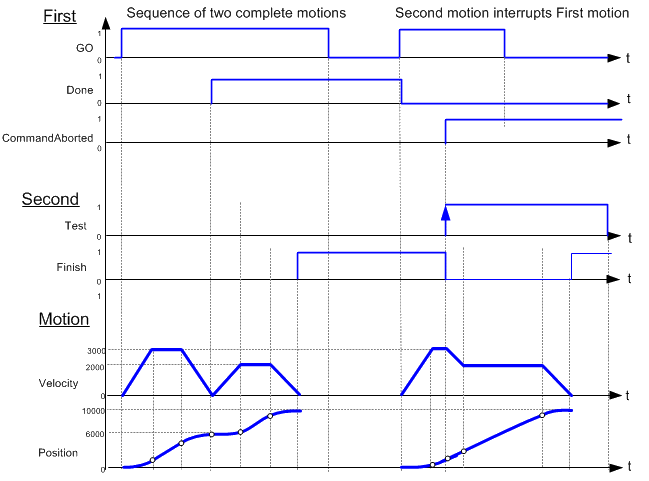
Figure 2: Time Diagram
FBD Language Example
Not available.
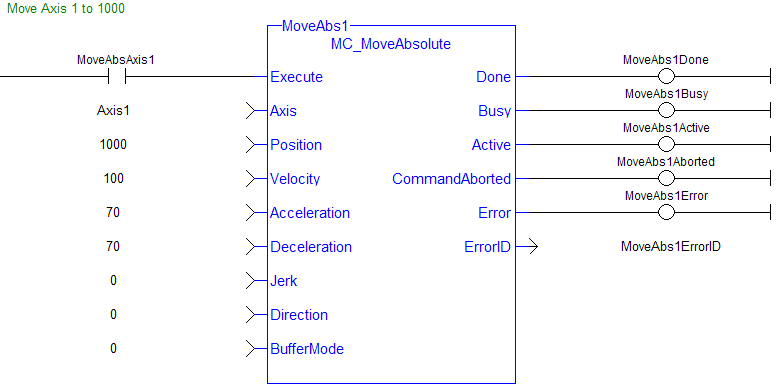
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* MC_MoveAbsolute ST example *) Inst_MC_MoveAbsolute( MovAbsReq, Axis1, 1234.567, 100.0, 100.0, 100.0, 0, 0, 0 ); //instance of MC_MoveAbsolute MovAbsDone := Inst_MC_MoveAbsolute.Done; //store done output into user defined variable MovAbsBusy := Inst_MC_MoveAbsolute.Busy; MovAbsActive := Inst_MC_MoveAbsolute.Active; MovAbsAborted := Inst_MC_MoveAbsolute.CommandAborted; MovAbsError := Inst_MC_MoveAbsolute.Error; MovAbsErrID := Inst_MC_MoveAbsolute.ErrorID;
See Also





