Description
AXIS#.VL.KI sets the integral gain of the velocity loop.
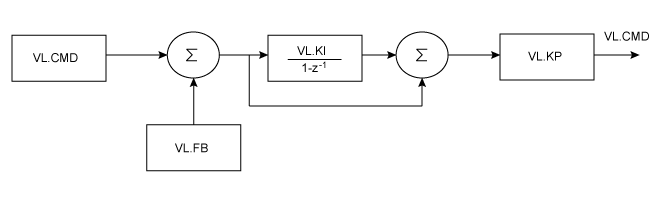
A factor of 2π is included in the time calculation, therefore a PI velocity loop with a constant error of 1 rps in which AXIS#.VL.KI is set to 160 and AXIS#.VL.KP is set to 1, will take (1000/160)*2π ms to increase the integral gain to 1. Therefore, the total gain is 2 at this time (see velocity loop structure below).
Integrator Dependencies
- By default, the drive is configured to only allow one integrator to be active at a time (See AXIS#.VL.KIMODE for details).
- The position integrator takes precedence over the velocity integrator; therefore, if AXIS#.PL.KI
is being used (and the drive is in Position Mode), AXIS#.VL.KI will be disabled.
To use both integrators together, use AXIS#.PL.KITHRESH to set the point at which the integrators toggle, or set AXIS#.VL.KIMODE to allow all integrators to be active at the same time.
- If AXIS#.IL.CMD saturates and is clamped by AXIS#.IL.LIMITP or AXIS#.IL.LIMITN, then the integrator will hold and stop integrating. The integrator will keep its current state and continue to wind up or discharge once the axis comes out of current saturation
Velocity Loop Structure
Versions
| Action | Version | Notes |
|---|---|---|
| Implemented | 02-00-00-000 |
General Information
Variants Supported
All variants are supported.
Industrial Ethernet Information
|
Command |
Index |
SubIndex |
Data Type |
Units |
Float Scale |
Access |
PDO Mappable |
|---|---|---|---|---|---|---|---|
|
AXIS1.VL.KI |
5011h |
02h |
Unsigned32 |
- |
1000:1 |
Read/Write |
No |
|
ID |
Instance |
Attribute |
Name |
Data Type |
Access |
User Mappable |
|---|---|---|---|---|---|---|
|
6028 |
1 |
6028 (0x178c) |
AXIS1.VL.KI |
Signed32 |
Read/Write |
Yes |
|
Parameter |
PNU |
Data Type |
Access |
Units |
|---|---|---|---|---|
|
AXIS1.VL.KI |
6028 |
Float |
Read/Write |
- |





