AKT2G-SM-L15 LEDs and Connections
-
-
WARNING! Risk of electric shock and damage of devices possible!
Bring the bus terminal system into a safe, powered down state before starting installation, disassembly or wiring of the Bus Terminals!
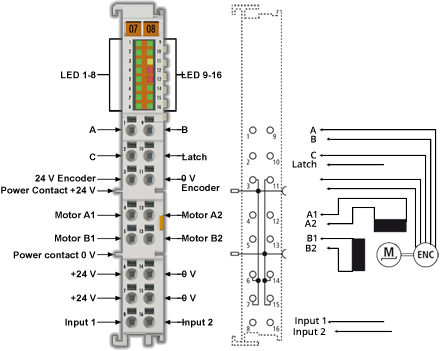
Figure 1: LEDs and connection of the AKT2G-SM-L15
LEDs
| No. | LED | Color | Meaning | |
|---|---|---|---|---|
|
1 |
RUN |
green |
This LED indicates the terminal's operating state: |
|
|
off |
State of the EtherCAT State Machine: INIT = Initialization of the terminal or BOOTSTRAP = Function for firmware updates of the terminal |
|||
|
blinking |
State of the EtherCAT State Machine: PREOP = Setting for mailbox communication and variant standard settings |
|||
|
single flash |
State of the EtherCAT State Machine: SAFEOP = Channel checking of the Sync Manager and the Distributed Clocks. Outputs stay in safe operation mode. |
|||
|
on |
State of the EtherCAT State Machine: OP = Normal operation mode, mailbox- and process data communication possible |
|||
|
2 |
Encoder |
green |
on |
Encoder ready for operation |
|
3 |
A |
green |
on |
Signal at encoder input A |
|
4 |
B |
green |
on |
Signal at encoder input B |
|
5 |
C |
green |
on |
Signal at encoder input C |
|
6 |
Latch |
green |
on |
Signal at latch input |
|
7 |
Turn CW |
green |
on |
Motor is triggered clock wise |
|
8 |
Input 1 |
green |
on |
Signal at digital input 1 |
|
9 |
Driver |
green |
on |
Driver stage ready for operation |
|
10 |
Power |
green |
off |
The power supply voltage (24 VDC) is absent or the motor control is blocked (Index 6010:02] is not set)) |
|
on |
The power supply voltage (24 VDC) is present |
|||
|
11 |
Warning |
yellow |
on |
Configuration error, e.g.:
|
|
12 |
Error A |
red |
on |
Configuration error of output stage A, e.g.:
|
|
13 |
Error B |
red |
on |
Configuration error of output stage B, e.g.:
|
|
14 |
Enable |
green |
off |
The motor control is blocked (Index 6010:02] is not set) or SM-L15 is not ready for operation |
|
on |
The motor control is activated (Index 6010:02] is set) or SM-L15 is ready for operation |
|||
|
15 |
Turn CCW |
green |
on |
Motor is triggered counter clock wise |
|
16 |
Input 2 |
green |
on |
Signal at digital input 2 |
Terminal Points
|
Terminal point |
Name |
Signal |
|---|---|---|
|
1 |
A |
Encoder input A |
|
2 |
C |
Encoder input C (zero input). If object 7000:01 is set in the control word and a rising edge occurs at encoder input C, the current counter value is stored as a reference mark in the latch register. |
|
3 |
Encoder supply +24V |
Encoder supply + 24 V, internally connected with positive power contact and pin 6, 7 |
|
4 |
A1 |
Motor winding A1 |
|
5 |
B1 |
Motor winding B1 |
|
6 |
+24V |
+24 VDC, internally connected with positive power contact and pin 3, 7 |
|
7 |
+24V |
+24 VDC, internally connected with positive power contact and pin 3, 7 |
|
8 |
Input 1 |
Digital input 1 (24 VDC) |
|
9 |
B |
Encoder input B |
|
10 |
Latch |
Latch input. The current counter value is stored as a reference mark in the latch register, if |
|
11 |
Encoder supply 0V |
Encoder supply 0 V, internally connected with negative power contact and pin 14, 15 |
|
12 |
A2 |
Motor winding A2 |
|
13 |
B2 |
Motor winding B2 |
|
14 |
0V |
0 VDC, internally connected with negative power contact and pin 11, 15 |
|
15 |
0V |
0 VDC, internally connected with negative power contact and pin 11, 14 |
|
16 |
Input 2 |
Digital input 2 (24 VDC), also configurable as a digital output (0,5 A) |





