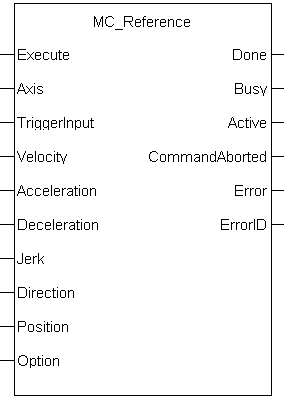
 MC_ReferenceMC_Reference
MC_ReferenceMC_Reference
At this time, position capture is not available for PLCopenA vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML axes assigned to the secondary feedback input (digitizing axes). Therefore, MC_Reference cannot be used to home digitizing axes at this time.
For more detail on how inputs and outputs work, refer to PLCopen Function Blocks - General Rules
| Execute | Description | Requests to queue the MC_Reference move and arms reference trigger events |
| Data type | BOOL | |
| Range | 0, 1 | |
| Unit | n/a | |
| Default | — | |
|
Axis |
Description |
Name of a declared instance of the AXIS_REF library function. For more details,About Axis Name and Number) |
| Data type | ||
| Range |
[1,256] |
|
| Unit |
n/a |
|
| Default |
— |
|
|
TriggerInput |
Description |
TRIGGER_REF structure defines the trigger InputID INT : 0 = Capture Engine 0 1 = Capture Engine 1 Range is [0,1] For information on configuring the capture engines, refer to AKD Capture Engine Configuration. Direction INT; 1 = rising edgeA rising edge is the transition of a digital signal from low to high. It is also called positive edge of trigger, 2 = falling edge of trigger Trigid INT; must be zero
|
| Data type |
TRIGGER_REF |
|
| Range |
See Description above |
|
| Unit |
n/a |
|
| Default |
— |
|
|
Velocity |
Description |
Commanded velocity for the reference move |
| Data type |
LREAL |
|
| Range |
— |
|
| Unit |
User unit/sec |
|
| Default |
— |
|
| Acceleration | Description | Commanded acceleration for the reference move |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit/sec2 | |
| Default | — | |
| Deceleration | Description | Commanded deceleration for the reference move |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit/sec2 | |
| Default | — | |
| JerkIn physics, jerk is the rate of change of acceleration; more precisely, the derivative of acceleration with respect to time | Description | Commanded jerkIn physics, jerk is the rate of change of acceleration; more precisely, the derivative of acceleration with respect to time for the reference move (if zero, then trapezoidal acc/dec is used) |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit/sec3 | |
| Default | — | |
| Direction | Description | Commanded Direction of the reference |
| Data type | SINT | |
| Range | [0,1] | |
| Unit | n/a | |
| Default | — | |
| Position | Description | The position the axis will be reset to when at the machine reference location |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit | |
| Default | — | |
| Option | Description |
Option identifier for Resolvers/Modulo reference. 0 = Use latched position for reference 1 = use resolver position of nearest null for reference 2 pole resolver 2 = use resolver position of nearest null for reference 4 pole resolver 3 = use resolver position of nearest null for reference 6 pole resolver 4 = use resolver position of nearest null for reference 8 pole resolver 5 = use resolver position of nearest null for reference 10 pole resolver … 15 = use resolver position of nearest null for reference 30 pole resolver |
| Data type | SINT | |
| Range | [0,15] | |
| Unit | n/a | |
| Default | — |
| Done | Description | Indicates the reference move and position adjustment is complete |
| Data type | BOOL | |
| Busy | Description | Indicates this function block is executing |
| Data type | BOOL | |
| Active | Description | Indicates this move is the Active move |
| Data type | BOOL | |
| CommandAborted | Description | Indicates the move was aborted |
| Data type | BOOL | |
| Error | Description | Indicates an invalid input, or the move was terminated due to an error |
| Data type | BOOL | |
| ErrorID | Description |
Indicates the error if the Error output is high
|
| Data type | INT |
The following lists the steps for homing a PLCopen axis, using the MC_Reference function block. Not all of the steps are necessary depending on the configuration and the homing cycle design.
The sequence of events of a PLCopen homing cycle consists of the following steps:
For more details, see "PLCopen Homing"
Once the MC_Reference block is queued, but before it is completed, the cycle can be aborted with a MC_Halt or MC_Stop function block or by queuing a new motion function block with the Abort selected for buffer mode.
|
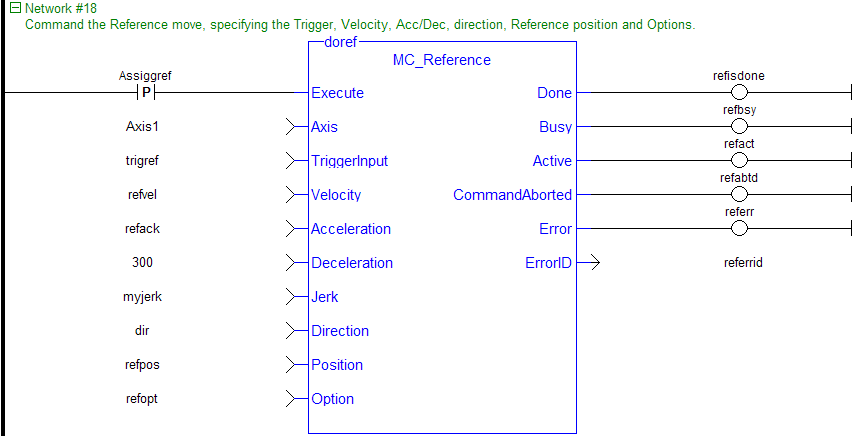
(* MC_Reference ST example *) TriggerInput.InputID := 0; //configure the reference InputID TriggerInput.DIRECTION := 1; //configure the reference direction Inst_MC_Reference( RefReq, Axis1, TriggerInput, 20.0, 100.0, 100.0, 100.0, 0, 0.0, 0 );
|
|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |

|