 ECATGetStatusECATGetStatus
ECATGetStatusECATGetStatusReturn the status word of the designated drive (SDO 0x6041).
The status machine for the status word corresponds to the CANopen status machine.
The Function BlockA function block groups an algorithm and a set of private data. It has inputs and outputs. receives the status word through the cyclic EtherCATEtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs PDO communications. The status word is captured in every instance of fixed PDO mapping.
For more details about the bit assignment see "CANopen Status Word".
|
Address |
Description |
EtherCAT address of the drive |
|
Data type |
DINT |
|
|
Range |
[0, 65535] |
|
|
Unit |
n/a |
|
|
Default |
— |
|
Status |
Description |
Status word of the drive as defined in the EtherCAT profile for the S300"Servostar 300 drive" See Servo Drive in Glossary/S400/S600/S700"Servostar 700 drive" See Servo Drive in Glossary. Compatible with CiA 402 definition of status word (CANopen object 0x6041). |
|
Data type |
UINT |
|
|
Unit |
n/a |
(********************************************************)
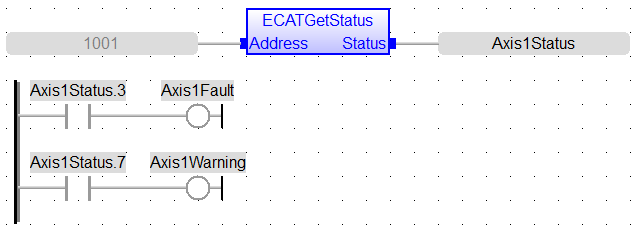
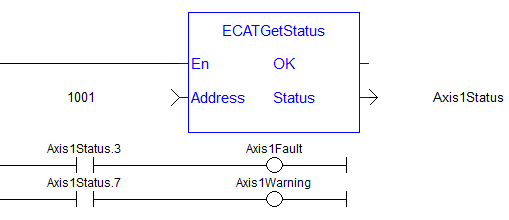
(* read EtherCAT axis status (Bit3: Fault, Bit7: Warning) *)
(********************************************************)
Axis1Status := ECATGetStatus(1001); //Read the ECAT Status Word (SDO 6041) of the Axis
Axis1Fault := Axis1Status.3;
Axis1Warning := Axis1Status.7;
|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |

|
 [Top]
[Top]