
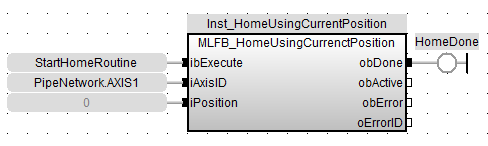
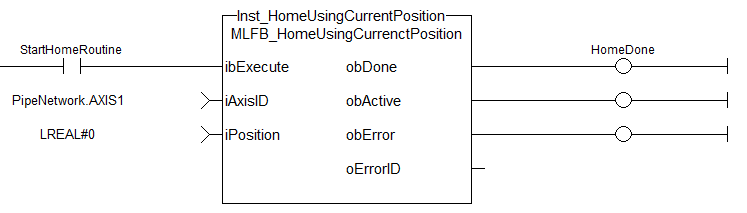
MLFB_HomeUsingCurrentPosition![]()

Using the current position is the most basic homing method. This method simply uses the current position of the motor as the home point reference.
You can use this parameter to set the value of the home position other then zero. This allows you to offset your home reference away from zero.
|
ibExecute |
Description |
Start homing, edge-triggered |
|
Data type |
BOOL |
|
iAxisID |
Description |
ID of Axis block of Pipe Network |
|
Data type |
DINT |
|
iPosition |
Description |
Reference position |
|
Data type |
LREAL |
|
obDone |
Description |
Done bit |
|
Data type |
BOOL |
|
obActive |
Description |
Active bit |
|
Data type |
BOOL |
|
obError |
Description |
Error bit |
|
Data type |
BOOL |
|
oErrorID |
Description |
Error identifier, see list here
|
||||||||||||
|
Data type |
DINT |
//No movement, set current axis position to position input in this case zero
Inst_MLFB_HomeUsingCurrenctPosition( StartHomeRoutine, PipeNetwork.AXIS1, 0 );
HomeDone := Inst_MLFB_HomeUsingCurrenctPosition.obDone;
|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |

|
 [Top]
[Top]