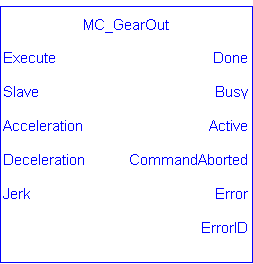
 MC_GearOutMC_GearOut
MC_GearOutMC_GearOutThe current velocity is calculated by taking the average of the actual velocity during the previous 16 cycles.
Like a MC_MoveVelocity move, the control continues to command the axis to move at this velocity until this MC_GearOut move is aborted. The Acceleration, Deceleration and JerkIn physics, jerk is the rate of change of acceleration; more precisely, the derivative of acceleration with respect to time input parameters are applied if this command velocity is modified by the MC_SetOverride function block. If this function block is called and the active move is not a MC_GearIn or MC_GearInPos move, this function block returns an error and the active move is not aborted.
The MC_GearOut is done when the slave axis is disengaged from the master axis. Once done, the MC_GearOut will remain busy and active until it is aborted by a different motion function block. This is different behavior than most other motion function blocks. The MC_GearOut function block represents an exception to the exclusivity rule as the Done and Active outputs may be true at the same time.
For more detail on how inputs and outputs work, refer to PLCopen Function Blocks - General Rules
|
Execute |
Description |
Requests to disengage the slave axis from a MC_GearIn or MC_GearInPos move |
|
Data type |
BOOL |
|
|
Range |
0, 1 |
|
|
Unit |
n/a |
|
|
Default |
— |
|
|
Slave |
Description |
Name of a declared instance of the AXIS_REF library function (for more details, About Axis Name and Number) |
|
Data type |
||
|
Range |
[1,256] |
|
|
Unit |
n/a |
|
|
Default |
— |
|
|
Acceleration |
Description |
Trapezoidal: Acceleration rate S-curve: Maximum acceleration |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit/sec2 |
|
|
Default |
— |
|
|
Deceleration |
Description |
Trapezoidal: Deceleration rate S-curve: Unused |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit/sec2 |
|
|
Default |
— |
|
|
Jerk |
Description |
Trapezoidal: 0 S-curve: Constant jerkIn physics, jerk is the rate of change of acceleration; more precisely, the derivative of acceleration with respect to time |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit/sec3 |
|
|
Default |
— |
|
Done |
Description |
Indicates the axis is disengaged from its master |
|
Data type |
BOOL |
|
|
Busy |
Description |
Indicates the function is executing |
|
Data type |
BOOL |
|
|
Active |
Description |
Indicates this move is the Active move |
|
Data type |
BOOL |
|
|
CommandAborted |
Description |
Indicates the move was aborted |
|
Data type |
BOOL |
|
|
Error |
Description |
Indicates an invalid input was specified or no MC_GearIn or MC_GearInPos move is active |
|
Data type |
BOOL |
|
|
ErrorID |
Description |
Indicates the error if Error output is set to TRUE
|
|
Data type |
INT |
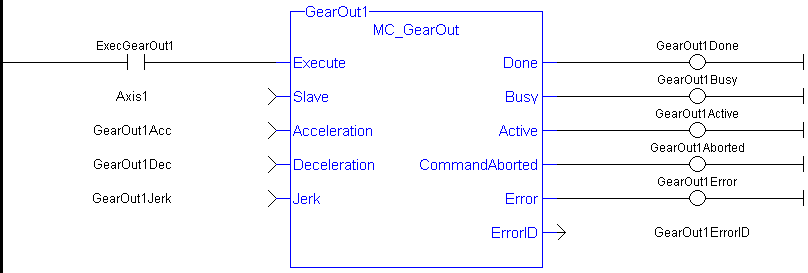
(* MC_GearOut ST example *)
Inst_MC_GearOut(ExecGearOut1,Axis1,GearOut1Acc,GearOut1Dec,GearOut1Jerk);
//Inst_MC_GearOut is instance of MC_GearOut
|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |
|
 [Top]
[Top]