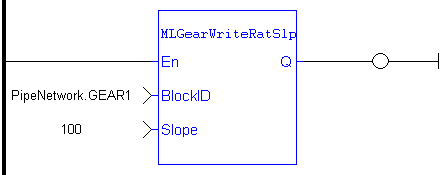
 MLGearWriteRatSlpMLGearWriteRatSlp
MLGearWriteRatSlpMLGearWriteRatSlpSet the Ratio Slope value of a selected Gear Pipe Block. Ratio Slope sets the limit at which step changes in ratio are implemented.
Be sure to set RatioSlope < (Ratio * EtherCATEtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs Update Rate). The Gear block will make a jump (without a ramp) from one gear to the next when the RatioSlope is greater than the Ratio change factor multiplied by the update rate scale factor.
Values lower then 1.0 can be entered, but require a leading zero (for example 0.8 instead of .8)
The GEAR block output will add a position offset to the GEAR block input when using a RatioSlope. See RatioSlope Offset in the Examples below.
|
BlockID |
Description |
ID number of an initialized Gear Pipe Block |
|
Data type |
DINT |
|
|
Range |
[-2147483648, 2147483648] |
|
|
Unit |
n/a |
|
|
Default |
— |
|
|
Slope |
Description |
New Ratio Slope value to be assigned to selected Gear Pipe Block. Values lower then 1.0 can be entered, but require a leading zero (for example 0.8 instead of .8) |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
1/sec |
|
|
Default |
— |
|
Default (.Q) |
Description |
Returns TRUE if Ratio Slope value is changed in the selected Gear Pipe Block See more details here |
|
Data type |
BOOL |
|
|
Unit |
n/a |
BOOL
|
//Set the Ratio Slope value of Gear1 Pipe Block to 100 MLGearWriteRatSlp(PipeNetwork.GEAR1, 100.0);
|

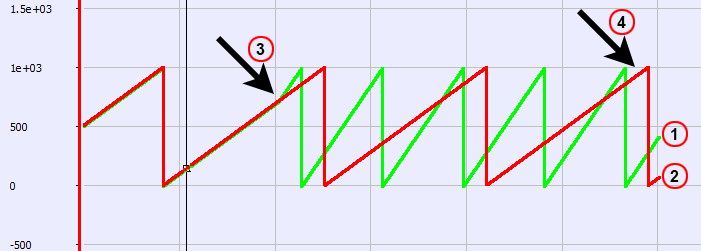
If MLGearWriteRatSlp is set as  to generate a ramp (instead of a step) when going from a gear ratio of 1 to 2, then there will be a position offset when the gear ratio settles as 2. In the image below the ratio goes from 1.0 to 2.0; Green is PN Gear Block Output and Red is Gearbox Input.
to generate a ramp (instead of a step) when going from a gear ratio of 1 to 2, then there will be a position offset when the gear ratio settles as 2. In the image below the ratio goes from 1.0 to 2.0; Green is PN Gear Block Output and Red is Gearbox Input.
|
|
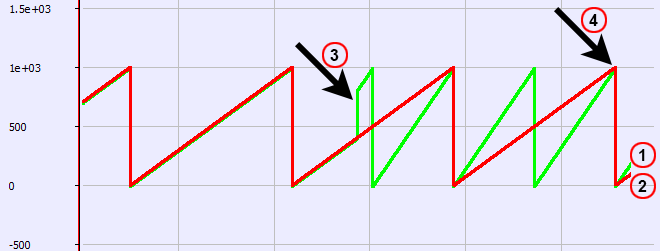
If MLGearWriteRatSlp is set without a ramp,  , then there will not be an offset.
, then there will not be an offset.
|
|
|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |
|
 [Top]
[Top]