If a Servo axis is selected, two tabs are available: Axis Data and Axis Limits. If a Digitizing axis is selected, only the Axis Data tab is available.
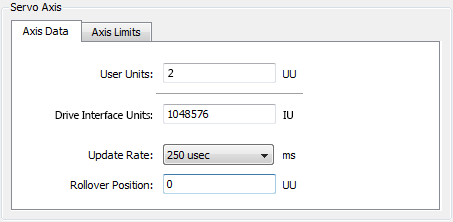
Figure 5-25: Servo Axis - Axis Data
The Servo Axis - Axis Data parameters are:
| Parameter | Description |
|---|---|
| User Units |
The User Units portion of the User Units / Interface Units ratio. The application program specifies positions in User Units. Positions are commanded to, and read from the drive bus interface in Interface Units. The User Units default value is 360. The default ratio is 360 User Units / 1048576 Interface Units. For example, with an ICH drive the value is 32, because there is a 32 mm (distance) per pole pair on the Kollmorgen Linear Motors. On a linear motor it is setup as 2 poles (1 pole par) per 1048576 feedback counts. |
| Drive Interface Units |
The Interface Units portion of the User Units/ Interface Units ratio. The drive provides an axis feedback resolution of 220 or 1048576 Interface Units per motor revolution for all motor feedback types including digital encoders. If the application programmer desires to work in User Units of degrees, the User Unit field of the PLCOpen Axis Data dialog typically would be set to 360, to define a 360 degree to 1048576 interface unit ratio. Similarly, if the axis scaling is 1000 user units per motor revolution, the ratio would be entered as 1000 User units to 1048576 Interface Units in the Axis Data dialog. There may be times where it is desired to work with an integer number of User Units per partial revolution of the motor, or a non-integer number of User Units per revolution of the motor. To accommodate this, the ratio of User Units to Interface Units must be computed such that both terms of the ratio are integers. See the note and examples below. |
| Update Rate |
The rate at which the axis's feedback is read and a new command position is generated. The choices are: This rate can be slower or equal to the EtherCAT Cycle Time If you select an axis Update Rate which is faster than the EtherCATEtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs Cycle Time, the axis is set to run at the EtherCAT Cycle Time. |
| Rollover Position |
The value at which the axis position rollovers to zero. Rollover Position is specified in User Units. For example: If the rollover position is 1000, the axis position counts up from 0 to 999 and then rollover back to 0. In the reverse direction, the axis position counts down to 0 and then rollover to 999. If Rollover Position is 0, no rollover occurs. Axis positions become negative values when counting down below 0. |
Why enter the axis scaling as a ratio of integers rather than a decimal number?
This makes representing the UU to IU scaling as a ratio of integers the most exact and easily represented method.
Example 1
It is desired to work in inches for a linear axis where the axis is driven with a rotary motor and lead screw of 20mm/revolution pitch. We must calculate a User Unit to Interface Unit ratio where both terms of the ratio are integers. (ratio shown below is optionally simplified)
20mm 1 in 1 Rev 20 in 200 in 25 * 8 in 25 in
----- * ------- * ---------- = ------------- = ------------ = ------------- = -----------
1 Rev 25.4 mm 1048576 IU 26633830.4 IU 266338304 IU 33292288*8 IU 33292288 IU
We would enter 25 User units, and 33292288 Interface units in the PLCOpen Axis Data dialog.
Example 2
It is desired to work in degrees for a rotary axis where the axis is driven with a gear ratio of 1/3 degree rotary motion per motor revolution. We must calculate a User Unit to Interface Unit ratio where both term of the ratio are integers.
1/3 deg 1 Rev 1 deg 1 deg
------- * ---------- = -------------- = ----------
1 Rev 1048576 IU 1048576 * 3 IU 3145728 IU
We would enter 1 User Unit, and 3145728 Interface units in the PLCOpen Axis Data dialog.
|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |
|