 FB_AKDFltRpt
FB_AKDFltRpt

Description
Outputs AKD drive fault Information.
The oFAULT output turns TRUE when the selected drive goes into a fault state. This function block outputs the total number of faults in the AKD drive fault history variable (Pre-Defined Error Field Object 1003h), and the fault number and message for the last 3 drive faults.
Each fault has two outputs: the fault number and a fault message. The fault number is the same number as reported on the display of the AKD drive. The fault message provides a short description of the fault. For example if the first fault is a feedback error with a F401 displayed on the front of the drive, the output of this FB are:
- oFirstFaultNumber = 401
- oFirstFaultMessage = Failed To Set Feedback Type
The iResetfaultHistory Input resets the faults reported by the FB.
The oDriveNotUsed outputs a 1 (True) if the axis is configured to Simulated in the ProjectEthercat setup screen.
-
-
This function block lists the earliest occurring fault first. This may not be the same fault as is being reported on an AKD's display, which is based on priority. The MCFB_AKDFault function block may be preferred as it reports the same error as displayed on the drive.
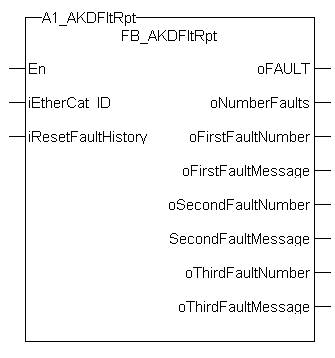
This function Block can be used with either the PipeNetwork or PLCopen![]() A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML Motion engines.The following figure shows the function block I/O:
A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML Motion engines.The following figure shows the function block I/O:
Arguments
Input
|
EN |
Description |
ENABLES the Kollmorgen UDFB |
|
Data type |
BOOL |
|
|
Range |
[0 , 1] |
|
|
Unit |
n/a |
|
|
Default |
— |
|
|
iEtherCat_ID |
Description |
EtherCAT |
|
Data type |
INT |
|
|
Range |
— |
|
|
Unit |
n/a |
|
|
Default |
— |
|
|
iRstFltHist |
Description |
When input is TRUE, clears all Faults saved to drives history |
|
Data type |
BOOL |
|
|
Range |
[0 , 1] |
|
|
Unit |
n/a |
|
|
Default |
— |
Output
|
oFAULT |
Description |
TRUE if selected drive currently has a Fault |
|
Data type |
BOOL |
|
|
Unit |
n/a |
|
|
oNumberFaults |
Description |
Number of faults saved in the Drive's history |
|
Data type |
DINT |
|
|
Range |
[0 , 10] |
|
|
Unit |
n/a |
|
|
oFirstFaultNumber |
Description |
Three digit AKD Fault identifier |
|
Data type |
DINT |
|
|
Range |
[100 , 999] |
|
|
Unit |
n/a |
|
|
oFirstFaultMessage |
Description |
Description of the Fault |
|
Data type |
STRING |
|
|
Unit |
n/a |
|
|
oSecondFaultNumber |
Description |
Three digit AKD Fault identifier. |
|
Data type |
DINT |
|
|
Range |
[100 , 999] |
|
|
Unit |
n/a |
|
|
oSecondFaultMessage |
Description |
Description of the Fault |
|
Data type |
STRING |
|
|
Unit |
n/a |
|
|
oThirdFaultNumber |
Description |
Three digit AKD Fault identifier |
|
Data type |
DINT |
|
|
Range |
[100 , 999] |
|
|
Unit |
n/a |
|
|
oThirdFaultMessage |
Description |
Description of the Fault |
|
Data type |
STRING |
|
|
Unit |
n/a |
|
|
oDriveNotUsed |
Description |
Is this Drive Real (0) on Simulated (1) |
|
Data type |
BOOL |
|
|
Unit |
n/a |
Usage
Typical usage for this UDFB are:
- Provide drive fault information that the application program uses to determine next steps such as perform a machine controlled stop or perform an immediate disable of the servo drives.
- In the application program send output fault information from this UDFB to the HMI
 "Human-machine interfaces "
Also known as computer-human interfaces (CHI), and formerly known as man-machine interfaces, they are usually employed to communicate with PLCs and other computers, such as entering and monitoring temperatures or pressures for further automated control or emergency response for review by the machine operator.
"Human-machine interfaces "
Also known as computer-human interfaces (CHI), and formerly known as man-machine interfaces, they are usually employed to communicate with PLCs and other computers, such as entering and monitoring temperatures or pressures for further automated control or emergency response for review by the machine operator.
Related Functions
MC_ReadStatus (PLCopen Motion Engine)
MLAxisStatus (Pipe Network Motion Engine)
Example
Structured Text
//Execute the Function Block
1_AKDFltRpt (1001, resetFaultHistST);
//Read Function
AKD1_Fault:= A1_AKDFltRpt.oFault;
AKD1_NumFault:= A1_AKDFltRpt.oNumberFaults;
AKD1_FirstFaultNumber:= A1_AKDFltRpt.oFirstFaultNumber;
AKD1_FirstFaultMessage:= A1_AKDFltRpt.oFirstFaultMessage;
AKD1_SecondFaultNumber:= A1_AKDFltRpt.oSecondFaultNumber;
AKD1_SecondFaultMessage:= A1_AKDFltRpt.oSecondFaultMessage;
AKD1_ThirdFaultNumber:= A1_AKDFltRpt.oThirdFaultNumber;
AKD1_ThirdFaultMessage:= A1_AKDFltRpt.oThirdFaultMessage;
;
-
-
A1_FaultReporting is an instance of the FB_S700FltRpt function block.
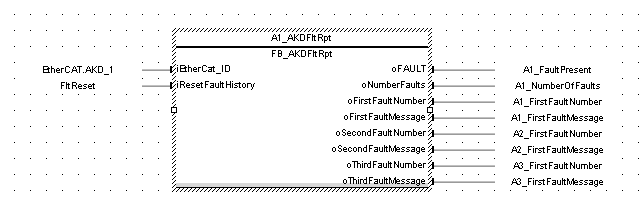
Ladder Diagram
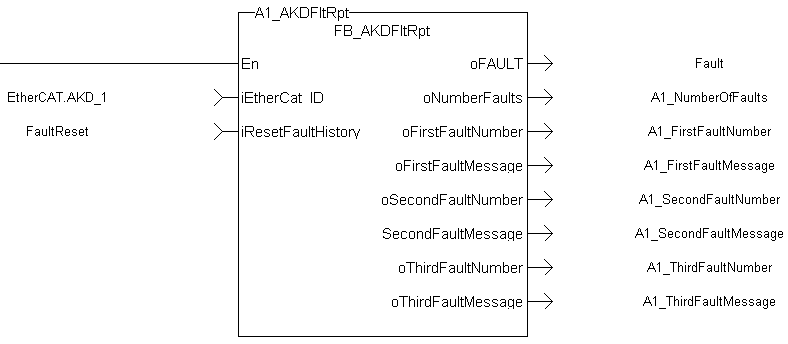
Function Block Diagram
 [Top]
[Top]






