Master Configuration
EtherCAT![]() EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs communicates a maximum of 1486 bytes of distributed process data with just one Ethernet
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs communicates a maximum of 1486 bytes of distributed process data with just one Ethernet![]() Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) frame. Therefore, unlike other solutions where the master device in each network cycle has to process, send and receive frames for each node, EtherCAT systems typically only need one or two frames per cycle for the entire communication with all nodes, so EtherCAT masters do not require a dedicated communication processor. The master functionality puts hardly any load on the host CPU, which can handle this task easily while processing the application program: so EtherCAT can be implemented without special or expensive active plug-in cards, just by using a passive NIC
Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) frame. Therefore, unlike other solutions where the master device in each network cycle has to process, send and receive frames for each node, EtherCAT systems typically only need one or two frames per cycle for the entire communication with all nodes, so EtherCAT masters do not require a dedicated communication processor. The master functionality puts hardly any load on the host CPU, which can handle this task easily while processing the application program: so EtherCAT can be implemented without special or expensive active plug-in cards, just by using a passive NIC![]() "Network Interface Card"
A network interface controller (or card) is a hardware device that handles an interface to a computer network and allows a network-capable device to access that network card or the on-board Ethernet MAC. Implementation of an EtherCAT master is very easy, particularly for small and medium-sized control systems and for clearly defined applications.
"Network Interface Card"
A network interface controller (or card) is a hardware device that handles an interface to a computer network and allows a network-capable device to access that network card or the on-board Ethernet MAC. Implementation of an EtherCAT master is very easy, particularly for small and medium-sized control systems and for clearly defined applications.
For example, a PLC![]() "Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
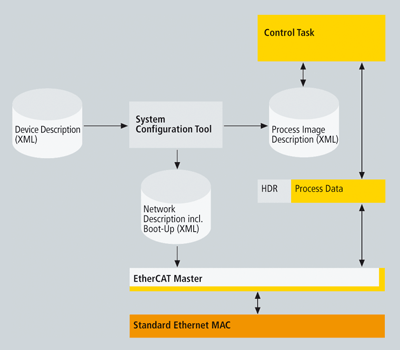
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events with a single process image: if it does not exceed the 1486 bytes, cyclic sending of a single Ethernet frame with the cycle time of the PLC is sufficient (as shown in Master-Implementation with one Process Image). Because the header does not change at run-time
"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events with a single process image: if it does not exceed the 1486 bytes, cyclic sending of a single Ethernet frame with the cycle time of the PLC is sufficient (as shown in Master-Implementation with one Process Image). Because the header does not change at run-time![]() In computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running, the only thing required is that a constant header be added to the process image and that the result be transferred to the Ethernet controller.
In computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running, the only thing required is that a constant header be added to the process image and that the result be transferred to the Ethernet controller.
The process image is already sorted, since with EtherCAT mapping does not occur in the master, but in the slaves - the peripheral devices insert their data at the respective points in the passing frame. This further unburdens the host CPU. It was found that an EtherCAT master entirely implemented in software on the host CPU uses less of its processing power than much slower fieldbus systems implemented with active plug-in cards; servicing the DPRAM of the active card alone puts more load on the host.
System configuration tools provide the network and device parameters (including the corresponding boot-up sequence) in a standardized XML![]() "Extensible Markup Language "
XML is a general-purpose markup language. It is classified as an extensible language because it allows its users to define their own tags format.
"Extensible Markup Language "
XML is a general-purpose markup language. It is classified as an extensible language because it allows its users to define their own tags format.
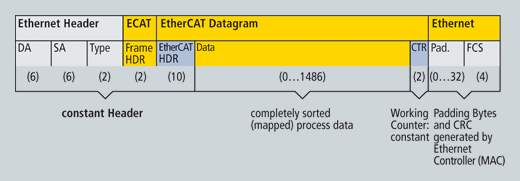
Figure 5-58: Master-Implementation with one Process Image