Axis Data Parameters
If a Servo axis is selected, two tabs are available: Axis Data and Axis Limits. If a Digitizing axis is selected, only the Axis Data tab is available. By default, new axes will be defined using degrees as the measurement unit.
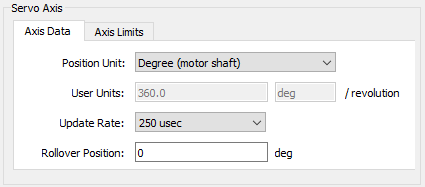
Figure 4-22: Servo Axis - Axis Data
The Servo Axis - Axis Data parameters are:
| Parameter | Description |
|---|---|
| Position Unit |
This field sets the units (see UNIT Parameters ) used by the drive axis. When the axis is defined as an AKD2G, the units and value will be synchronized with the drive.
|
| User Units / Revolution |
The value used to define an axis position or distance for an axis. The default values are: Counts: 65,536 / revolution Radian: 6.28318530717 (or 2π) / revolution Degree: 360 / revolution When the Unit is set to Custom you may enter your own value and units name, such as |
| Update Rate |
The rate at which the axis's feedback is read and a new command position is generated. The choices are:
This rate can be slower or equal to the EtherCAT Cycle Time If you select an axis Update Rate which is faster than the EtherCAT |
| Rollover Position |
The value at which the axis position rollovers to zero. Rollover Position is specified in User Units. For example: If the rollover position is 1000, the axis position counts up from 0 to 999 and then rollover back to 0. In the reverse direction, the axis position counts down to 0 and then rollover to 999. If Rollover Position is 0, no rollover occurs. Axis positions become negative values when counting down below 0. |







