Editable PDOs
This section lists all of the PDOs which may be edited. PDOs may be created (Add PDO), modified (Edit PDO), or removed from the project (Delete PDO). Please see the EtherCAT![]() EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs device-specific documentation for more details.
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs device-specific documentation for more details. 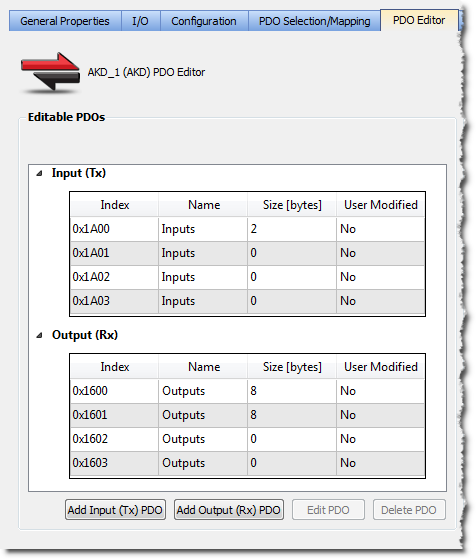
The Input (Tx) and Output (Rx) PDOs are grouped separately. Each PDO table contains the following information:
| Index | Identification value for the PDO. The range is defined by the EtherCAT specification. RxPDOs: 0x1600 to 0x17FF TxPDOs: 0x1A00 to 0x1BFF |
| Name | Text label to identify the PDO. The name is provided either by the device vendor or user, and can be changed by the user. |
| Size [bytes] | Total length for the PDO object(s) data. |
| User Modified | Yes: indicates the user has changed the PDO or its content No: indicates the PDO is the default provided by the device vendor. |
The KAS IDE![]() "Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger compiler enforces restrictions on the sizes of individual PDOs as well as on the sum of the sizes of PDOs. See PDO Restrictions and Compiler Errors for more information.
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger compiler enforces restrictions on the sizes of individual PDOs as well as on the sum of the sizes of PDOs. See PDO Restrictions and Compiler Errors for more information.







