Set Up a BBH SCU and an AKD2G with SMM
 This topic describes how to setup FSoE PDOs and copy links with a BBH SCU Master and an AKD2G with SMM. This example uses a simple EtherCAT
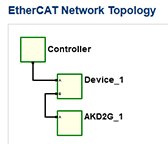
This topic describes how to setup FSoE PDOs and copy links with a BBH SCU Master and an AKD2G with SMM. This example uses a simple EtherCAT![]() EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs topology consisting of a PCMM (the Controller), a BBH SCU safety master (Device_1), and an AKD2G with SMM Basic safety drive (AKD2G_1). The example has two sections, the first is to create a safety application, the second is done in the KAS IDE
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs topology consisting of a PCMM (the Controller), a BBH SCU safety master (Device_1), and an AKD2G with SMM Basic safety drive (AKD2G_1). The example has two sections, the first is to create a safety application, the second is done in the KAS IDE![]() "Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger.
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger.
Create Safety Application
First we must use the SafePLC IDE to create a safety application. The application will contain a BBH SCU master and an AKD2Gwith Axis1 and Axis2 as slave devices.
- Set the AKD2G Connection IDs to match the the AKD2G SafeIDs.
- Compile and download the safety application to the SCU.
-
Run the safety application in BBH SCU.
The state will be “Run Intern” and the display will show “8”
KAS IDE Project Set Up
To finish the example, a project is created in the KAS IDE using the 2-axis Pipe Network template.
- The IP address of the PCMM controller is set in the project.
-
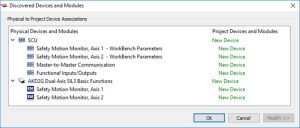
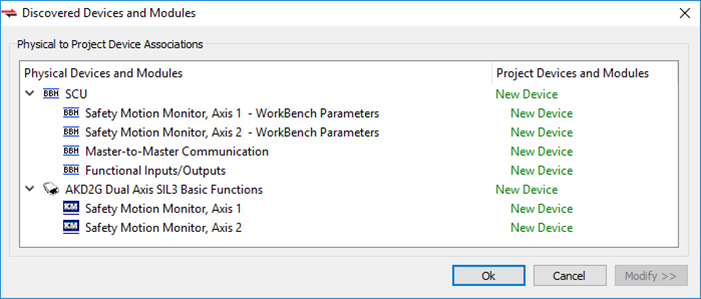
Scan the EtherCAT network to discover the devices.
-
We are prompted to recompile the project due to changes in the EtherCAT topology. We respond "No" because we have not set up the PDO copy links.
-
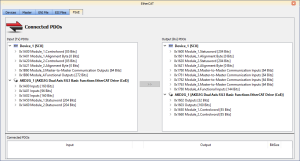
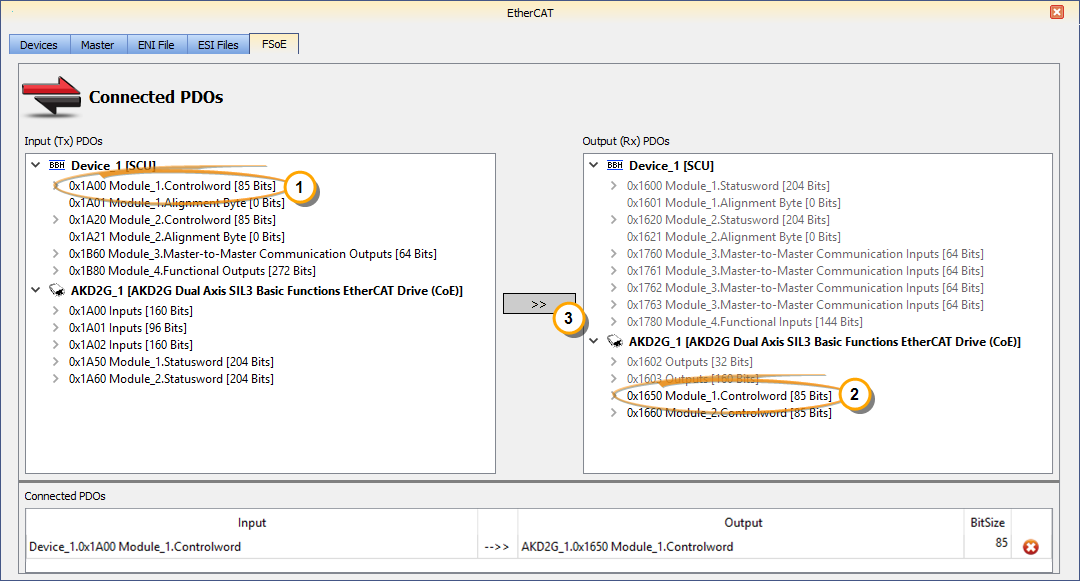
To connect the PDOs we open the FSoE / PDO Connections Tab which is populated with Input and Output PDOs.
-
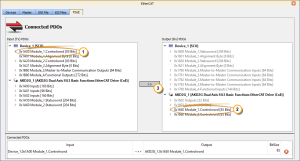
To connect PDOs we choose an input, an output, and click the Connect button. Connections are displayed at the bottom of the tab.
-
We make the following connections:
- Device_1[SCU] PDO 0x1A00 to AKD2G_1 PDO 0x1650
- Device_1 [SCU] PDO 0x1A20 to AKD2G_1 PDO 0x1660
- AKD2G_1 PDO 0x1A50 to Device_1 [SCU] PDO 0x1600
- AKD2G_1 PDO 0X1A60 to Device_1 [SCU] PDO 0x1620
- Compile, download, and run the KAS application.
- The BBH master has changed the state to "Run" and the display shows "4".
The Safety Master and the Safety Slave are now exchanging data over EtherCAT.







