How To Create a Digitizing Axis When EtherCAT Devices Are Not Connected
This process assumes that you are setting up a project and are not connected to the EtherCAT![]() EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs network. In this example we have added several devices to the EtherCAT branch of the Project View, including an AKD2G, an AKD-C, and two AKD-Ns.
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs network. In this example we have added several devices to the EtherCAT branch of the Project View, including an AKD2G, an AKD-C, and two AKD-Ns. 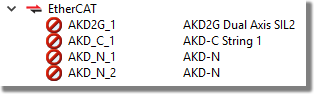
- From the Project Tree, right-click on the Controller > Motion > PLCopen
 A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML item and select New Axis.
A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML item and select New Axis.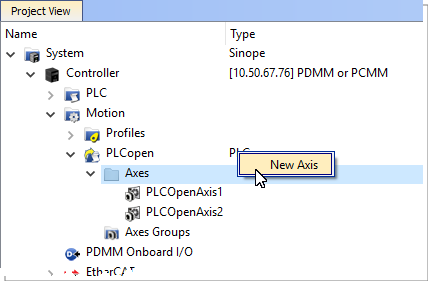
- Give the axis a name and click OK. Note that spaces are not supported and select "Digitizing" as the Type. See Common Axis Parameters for details.
- Digitizing axes have Bus and Feedback Settings data which needs to be defined. Double-click on the newly defined axis and select the Device which will provide the feedback information and the feedback parameters, including the CoE information that will be used. See Digitizing Axis Parameters for details.
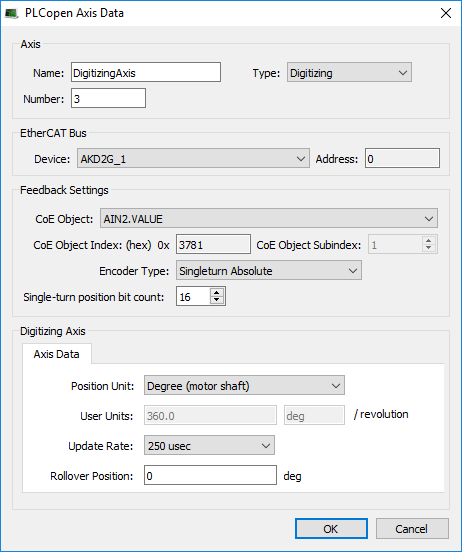
- Lastly, define the Axis Data Parameters.







