7 - KAS IDE - Import the ENI file
Open the .KAS project, and then open the EtherCAT![]() EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs item in the project tree. Go to the ENI File tab and import the .XML
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs item in the project tree. Go to the ENI File tab and import the .XML![]() "Extensible Markup Language "
XML is a general-purpose markup language. It is classified as an extensible language because it allows its users to define their own tags file
"Extensible Markup Language "
XML is a general-purpose markup language. It is classified as an extensible language because it allows its users to define their own tags file
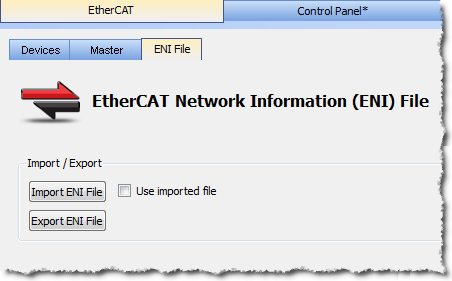
Figure 7-247: KAS IDE EtherCAT ENI File view
-
-
Importing an external ENI file overrides all EtherCAT project device information and configuration settings in the IDE
 "Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger. The following views and configurations are not applicable when using an imported ENI file:
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger. The following views and configurations are not applicable when using an imported ENI file:- Project View: All devices located under the EtherCAT node
- EtherCAT Device View tabs:
- General Properties
- PDO Selection/Mapping
- Distributed Clock
- CoE Init-Commands
- Slice I/O Properties
- Mapping PLC"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events Variables to Slice I/O or PDO objects
Information displayed in the views may not match the imported ENI file.







