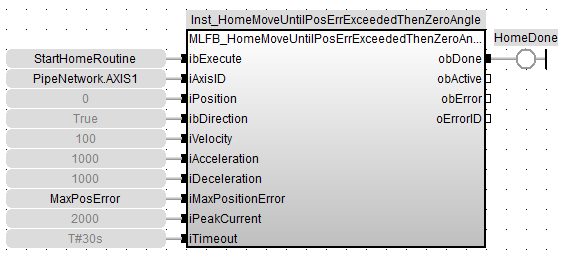
 MLFB_HomeMoveUntilPosErrExceededThenZeroAngle
MLFB_HomeMoveUntilPosErrExceededThenZeroAngle
Description
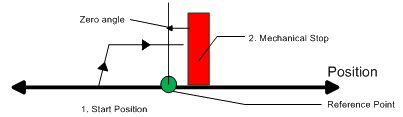
Similar to the Move Until Position Error Exceeded method, the move until position error exceeded then find zero angle. Mode follows the same steps, but upon completion of the move, it continues to move to find the zero angle reference of the motor.
Arguments
Input
|
ibExecute |
Description |
Start homing, edge-triggered |
|
Data type |
BOOL |
|
|
iAxisID |
Description |
ID of Axis block of Pipe Network |
|
Data type |
DINT |
|
|
iPosition |
Description |
Reference position |
|
Data type |
LREAL |
|
|
ibDirection |
Description |
0=positive, 1=negative |
|
Data type |
BOOL |
|
|
iVelocity |
Description |
Reference speed |
|
Data type |
LREAL |
|
|
iAcceleration |
Description |
Reference acceleration |
|
Data type |
LREAL |
|
|
iDeceleration |
Description |
Reference deceleration |
|
Data type |
LREAL |
|
|
iMaxPositionError |
Description |
Maximum position error |
|
Data type |
LREAL |
|
|
iPeakCurrent |
Description |
Peak current in mA |
|
Data type |
DINT |
|
|
iTimeout |
Description |
Time monitoring (T#0ms: off) |
|
Data type |
TIME |
Output
|
obDone |
Description |
Done bit |
||||||||||||
|
Data type |
BOOL |
|||||||||||||
|
obActive |
Description |
Active bit |
||||||||||||
|
Data type |
BOOL |
|||||||||||||
|
obError |
Description |
Error bit |
||||||||||||
|
Data type |
BOOL |
|||||||||||||
|
oErrorID |
Description |
Error identifier, see list here
|
||||||||||||
|
Data type |
DINT |
Example
ST
//Call homing function on Axis1 with preset velocity, accel, and decel values
//Start in negative direction and go until position error exceeds input value or time out
//afterterwards moves to zero angle and sets axis position to zero
//function block temporarily writes new max current value to 2 Amp while home routine active
Inst_MLFB_HomeMoveUntilPosErrExceededThenZeroAngle( StartHomeRoutine,
PipeNetwork.AXIS1,
0,
1,
100,
1000,
1000,
MaxPosError,
2000,
T#30s );
HomeDone := Inst_MLFB_HomeMoveUntilPosErrExceededThenZeroAngle.obDone;
Function Block Diagram
FFLD
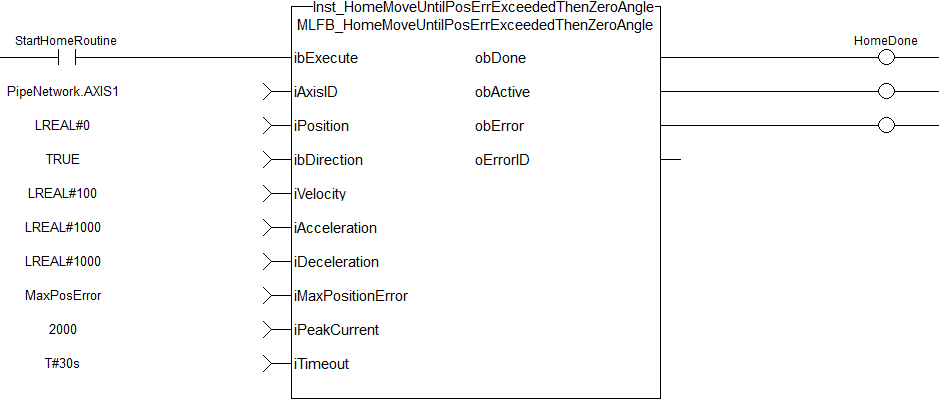
 [Top]
[Top]





