Map I/O from the Project Explorer
- In the Project Explorer, expand the Controller node and the EtherCAT
 EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs node(s) to access your devices.
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs node(s) to access your devices. 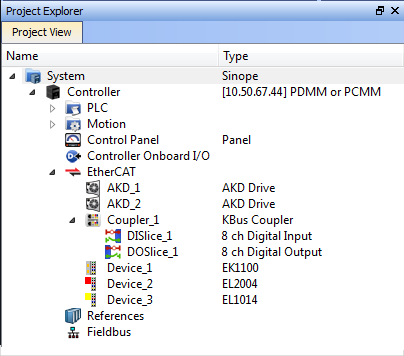
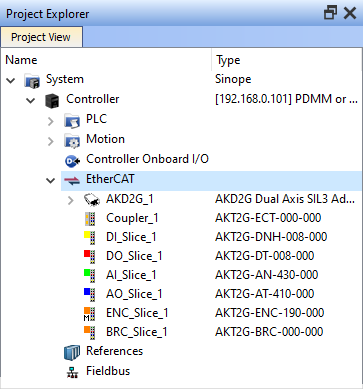
AKT (K-Bus) devices AKT2G (E-Bus) devices - Depending upon
the device, the properties are accessed in slightly different ways.
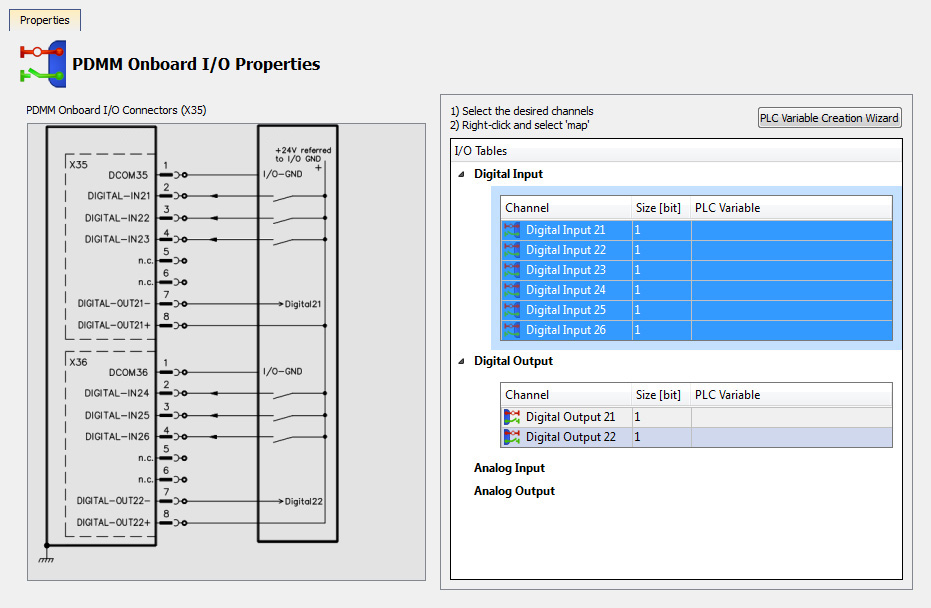
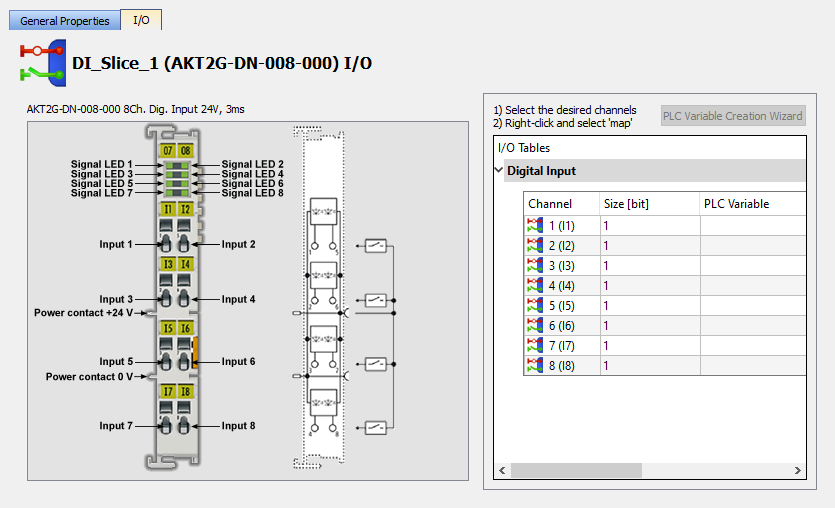
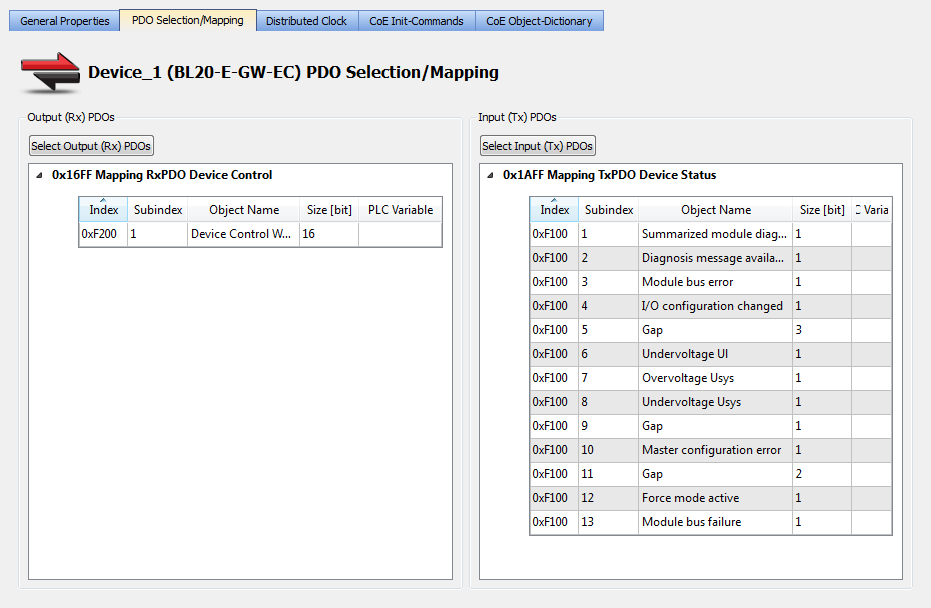
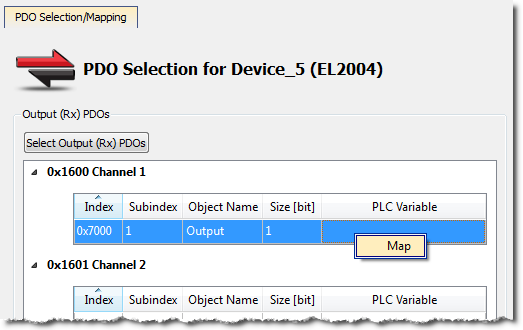
AKD or AKD2G AKD PDMM or PCMM I/O Slice Third-Party Devices Double-click on the drive and select the I/O tab Double-click Controller Onboard I/O Double-click the I/O Slice under EtherCAT (AKT2G) or in the Coupler entry (AKT). Double-click the device and select the PDO Selection/Mapping tab. 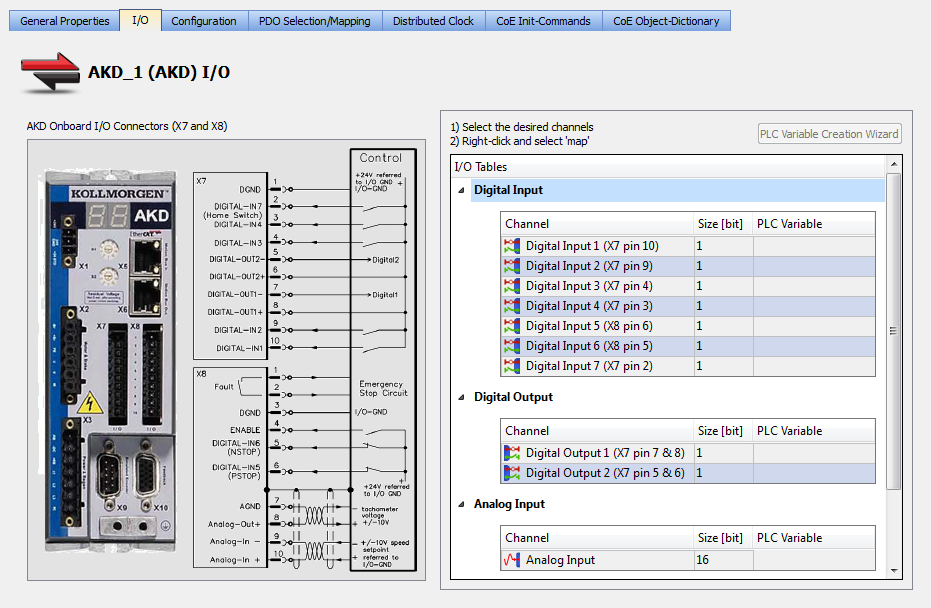
- There are several ways to map variables:
- Drag and drop a variable from the Dictionary onto a table entry.
- Use the PLC Variable Creation Wizard for Kollmorgen devices.
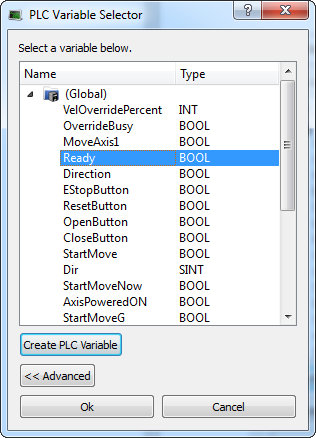
- Directly map/unmap the Inputs/Outputs to PLC variables using the PLC Variable Selector.
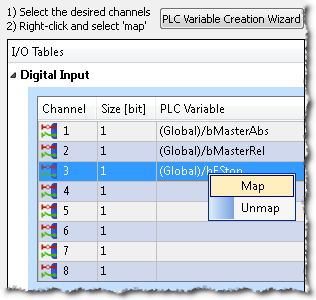
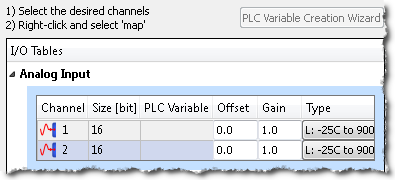
- Kollmorgen devices: Select the channel(s) you want to map. Selection may be done by click-dragging or shift-clicking a range of entries. The entire table may be selected by clicking on its border. After the selection is made, right-click and select Map. This opens the PLC Variable Selector.
- Third-party devices: Select a PLC Variable cell associated with the PDO object index, right-click and select Map.
- The list of variables is filtered to display only those with relevant types.
- For analog I/O, only variables with integer types are displayed.
- Because a variable can only be mapped to one channel or PDO object, when you link a variable to a new channel or PDO object, the previous mapping is removed (even if linked to another slice or device).
- Individual bits within a variable can be mapped to multiple I/O channels on different devices (AKD, AKD PDMM, PCMM, or Slice).
- Read Only PLC variables should not be mapped to inputs because the value will not be able to change to match the input state.
- Do not map PLC variables to third-party drive PDO objects. They may conflict with the KAS RuntimeIn computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running's internal motion engine read/write operations.
- Double-check before any confirmation because there is no possibility to Undo this operation.
- For details on the Create PLC Variable and Advanced buttons, see PLC Variable Selector.
- Kollmorgen devices: Select the channel(s) you want to map. Selection may be done by click-dragging or shift-clicking a range of entries. The entire table may be selected by clicking on its border. After the selection is made, right-click and select Map. This opens the PLC Variable Selector.
- For more details on parameters, see Analog I/O Parameters.
- For more information on the AKD Onboard EtherCAT I/Os, see Configure Onboard I/O.
- For more information on the AKD PDMM or PCMM local digital I/Os, see Configure Controller Onboard I/O.
The Unmap command in the contextual menu (see figure in step 5 above) allows you to remove the link between the variable and the associated channel(s). In addition, deleting a variable from the dictionary which is mapped to the channel(s) also removes the link(s).
-
-
Important Note About PLC Variable Mapping
Please be aware of the following limitation of PLC variables.
Each PLC variable can be mapped to an EtherCAT I/O and exclusively to either:- a Controller Onboard I/O
- an external driver






