Setting up Ethernet over EtherCAT (EoE)
If you are using firmware version 02-03-01-000 or later and your EtherCAT![]() EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs master supports Ethernet
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs master supports Ethernet![]() Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) over EtherCAT (EoE), a WorkBench connection to your drive can be established without connecting to the drive’s service port.
Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) over EtherCAT (EoE), a WorkBench connection to your drive can be established without connecting to the drive’s service port.
-
- If the service port and EoE network interface are used in parallel, the service port network interface shall be configured to be in a different subnet than the EoE network interface. Running both network interface in the same subnet is NOT supported.
The master uses the EtherCAT mailbox to forward the Ethernet traffic from your PC to the drive, allowing you to access the drive as if it was connected over Ethernet.
The following walk through uses a TwinCAT master as an example.
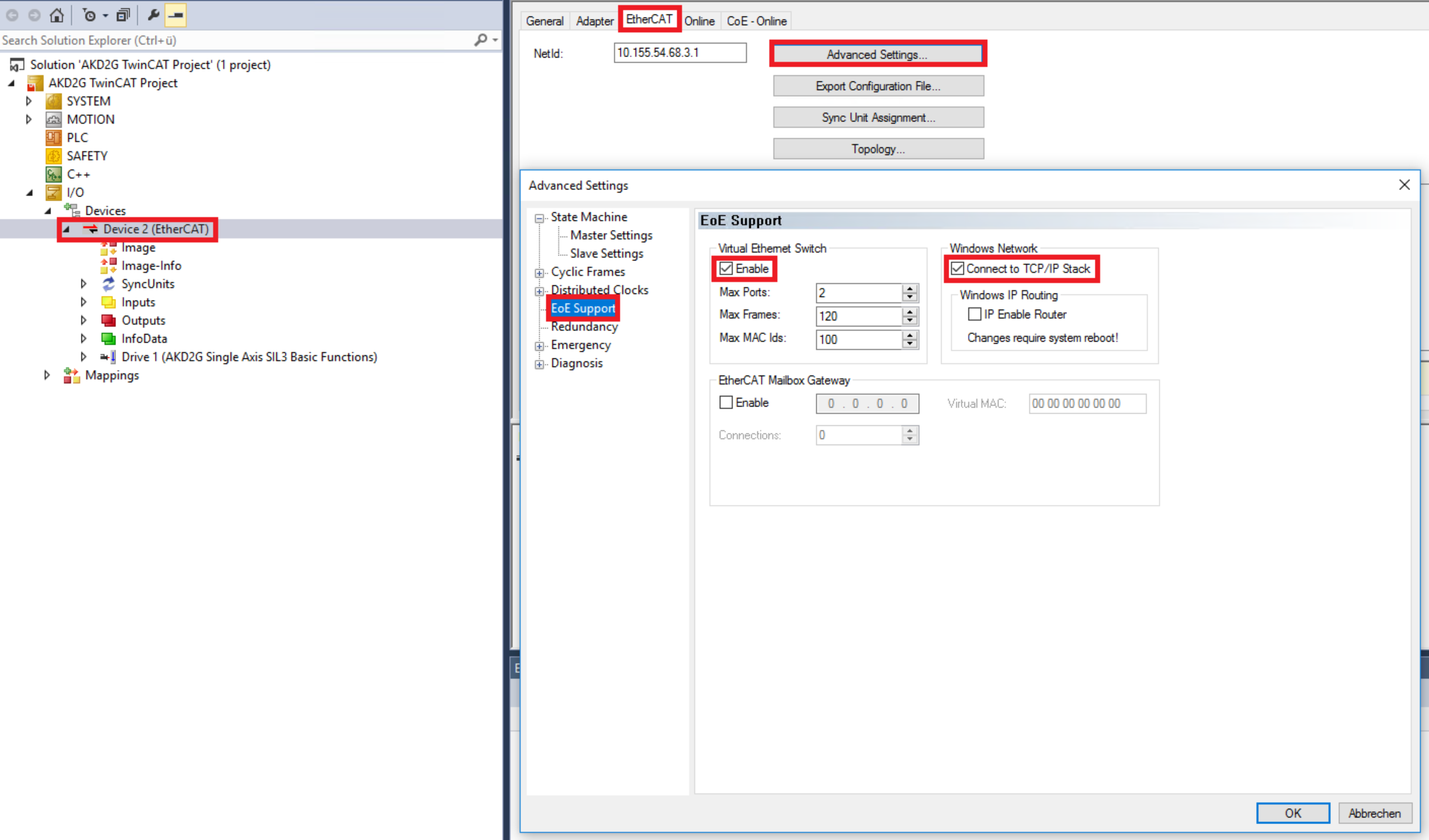
EtherCAT Device Settings
The first step is to make sure your EtherCAT device has EoE enabled. TwinCAT has a dedicated “EoE Support” page inside the EtherCAT device’s settings.
Enable "Virtual Ethernet Switch." Check the box "Connect to TCP/IP Stack."
Drive Settings
After setting up the EtherCAT device, you must enable EoE for the drive. In TwinCAT there is an EoE page within the Drive’s Mailbox settings. If the EoE page is not displayed, add the drive to the EtherCAT network again, using the latest device description.
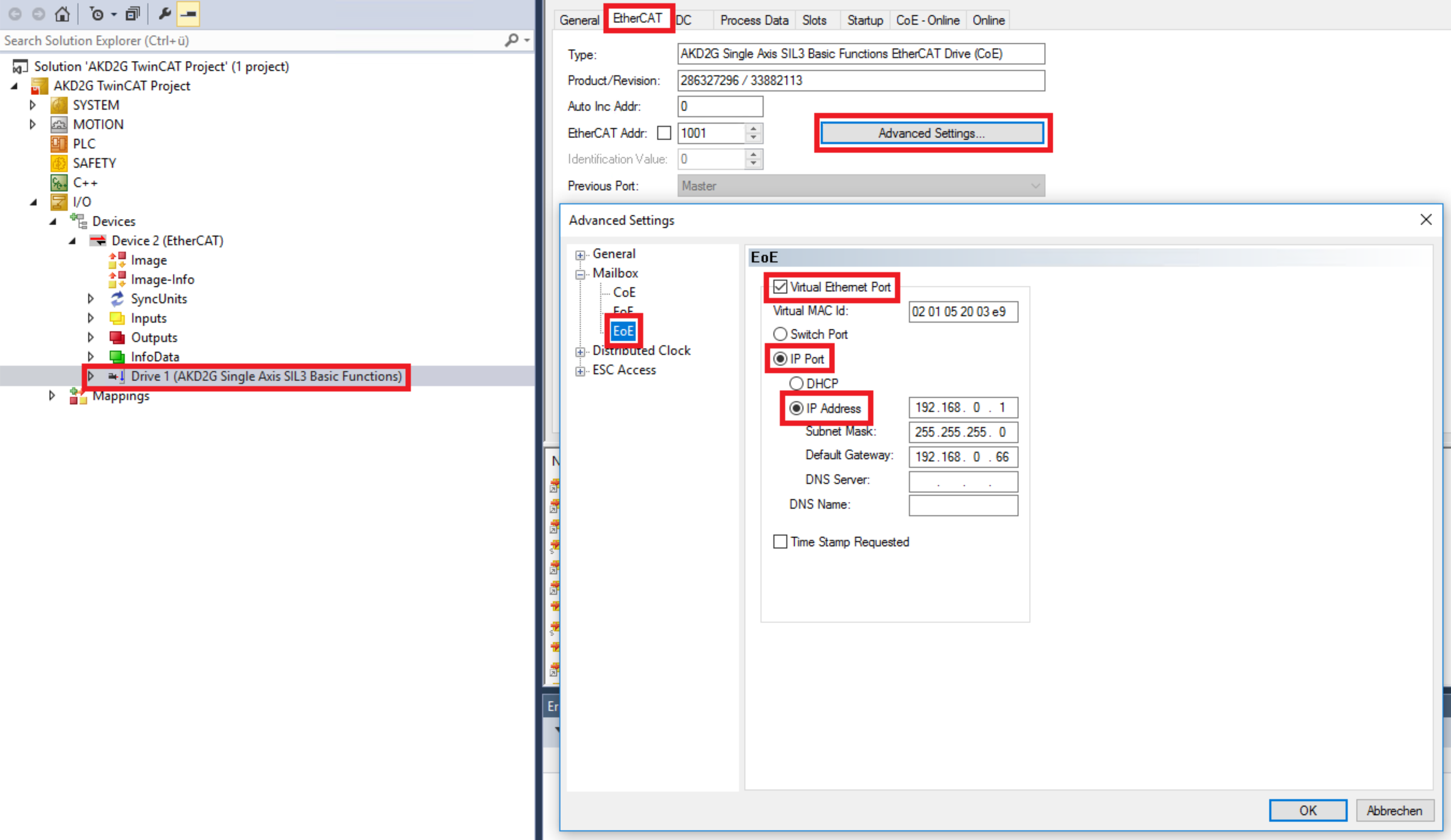
To enable EoE on your drive, check the “Virtual Ethernet Port” box, select “IP Port” and “IP Address and enter at least a valid IP address and subnet mask.
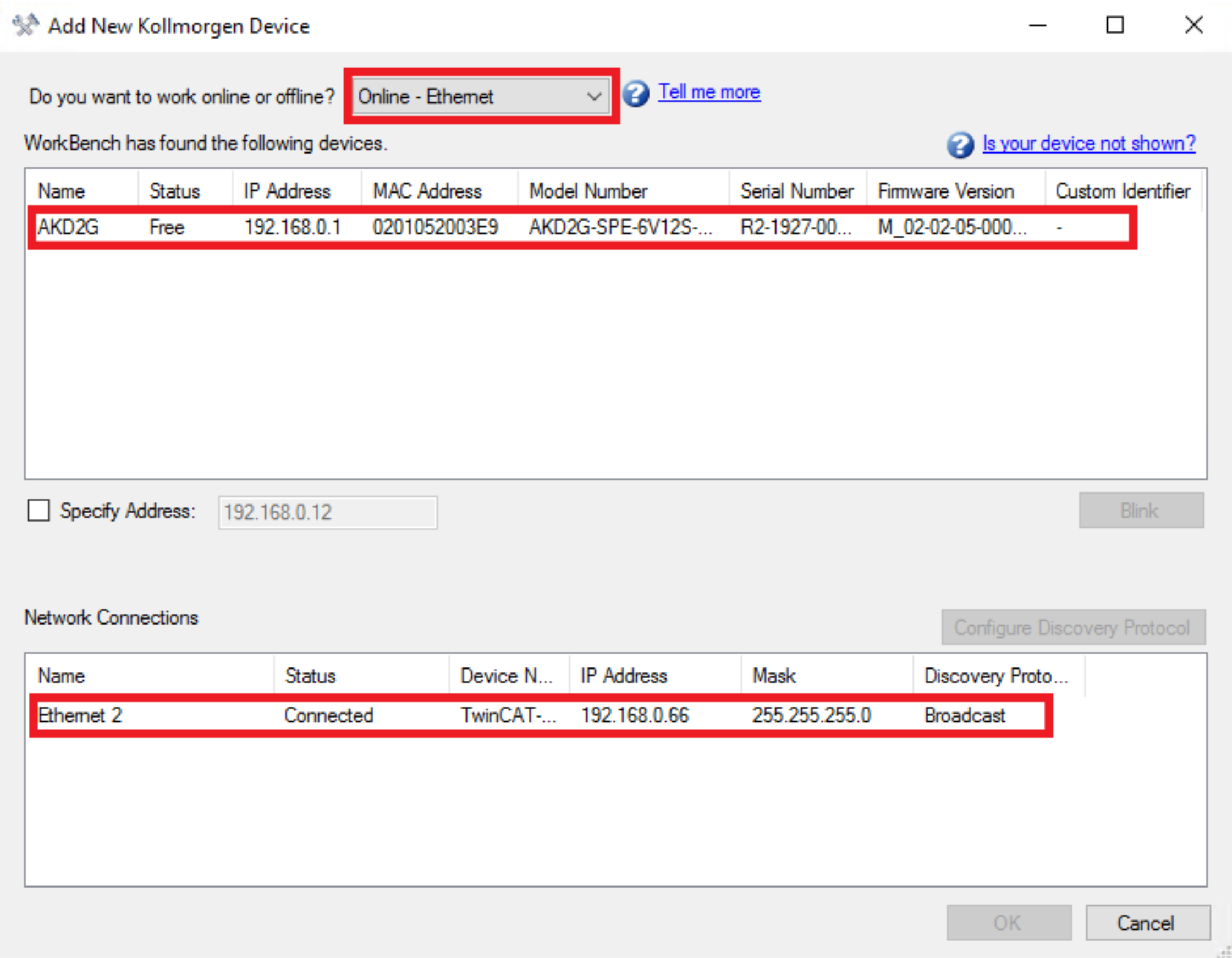
Connecting to the Drive
You should now be able to access your drive over WorkBench using EoE.
Open WorkBench and make sure the discovery protocol is enabled for the network interface that is in the subnet configured for your drive in the previous step. You can now connect to your drive as if it were connected over the service port.