AXIS#.PL.KFB
Description
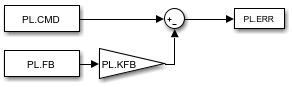
AXIS#.PL.KFB allows the user to scale the position feedback source into the position control loops
This is especially useful in dual-loop applications where the position loop feedback and velocity loop feedback come from different devices. AXIS#.PL.KFB and AXIS#.VL.KFB can be used to synchronize the values.
Examples
Usage
By default AXIS#.PL.KFB is set to 1.0 and should not be set to another value unless the application is using multiple feedback devices for a axis.
If the situation arose where two feedbacks were mounted to a rotary motor, and one of them was half the resolution of the first - and it was connected to the position feedback, while the full resolution device was connected to the velocity feedback, AXIS#.PL.KFB would need to be set to 2.0 and AXIS#.VL.KFB would be left at 1.0
Versions
| Action | Version | Notes |
|---|---|---|
| Implemented | 02-00-00-000 |
General Information
| Type | Read/Write |
| Units | N/A |
| Range | N/A |
| Default Value | 1 |
| Data Type | Float |
| See Also | VL.KFB |
| Stored in Non Volatile Memory | Yes |
Variants Supported
All variants are supported.






