Description
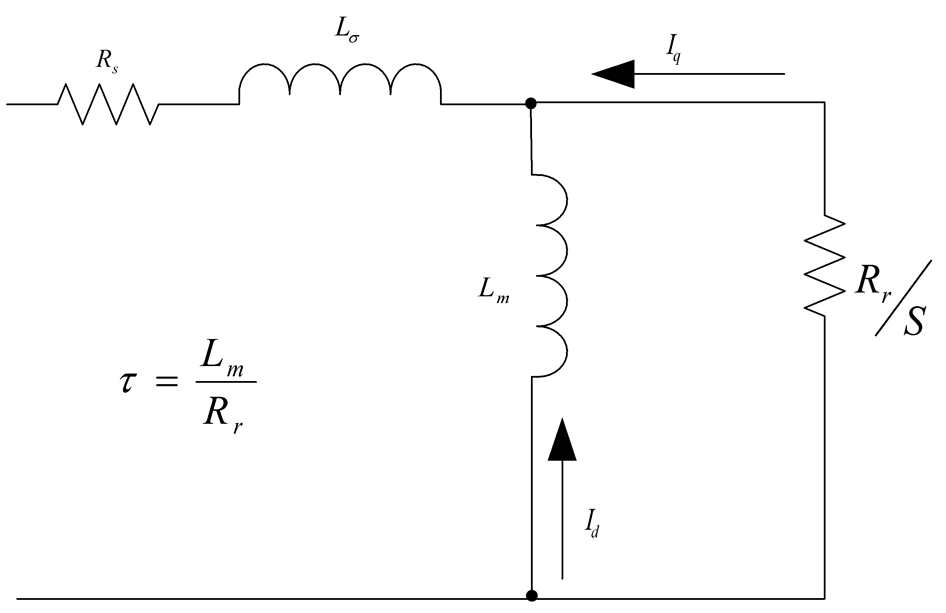
The rotor time constant is calculated as the ratio between rotor magnetizing inductance Lm and rotor resistance Rr from the following equivalent circuit of an induction machine.
Alternatively, the rotor time constant can be estimated from the rated current, magnetizing current (MOTOR.IMID) and rated slip frequency as follows:
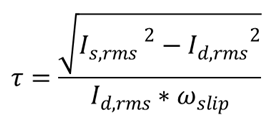
where Is,rms is the rated current, Id,rms is the rated magnetizing current, and ωslip is the rated slip frequency in rad/s.
-
-
τ is in seconds for the above formulas. It needs to converted to ms for the MOTOR.IMTR setting:
MOTOR.IMTR(ms) = τ*1000
General Information
|
Type |
R/W |
|
Units |
Ms |
|
Range |
1 to 16,000 |
|
Default Value |
100 |
|
Data Type |
Integer |
|
Start Version |
M_01-08-00-000 |
|
Index/Subindex |
Object Start Version |
|
|---|---|---|
|
5360h/0 |
M_01-08-00-000 |
Related Topics






