 Settings
Settings
Navigation Tree
The Settings view allows you to configure the drive to fit your specific application. When you click Settings in the navigation pane located to the left of the WorkBench screen, additional views for configuring your drive appear. By default, only settings applicable to your current drive operation mode and command source will appear in this tree. To show all settings available for the AKD (even if the these settings are not used with the current operation mode and command source), right click on Settings and select Show all Settings.
Settings View
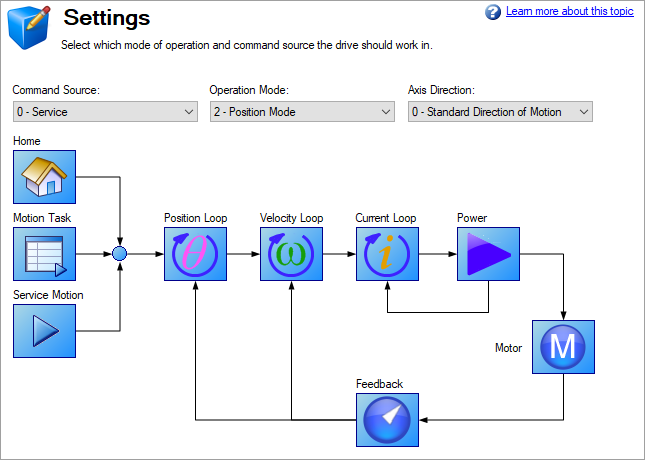
From the main Settings view, you can configure the following drive settings:
|
Button or Dialog Box |
Description |
|---|---|
|
Command Source |
Selects where the command is being provided: 0-Service: Communicate with the drive using the TCP/IP service channel. 1-Fieldbus 0-Service : For tuning and commanding motion via the AKD setup screens |
|
Operation Mode |
Selects the servo loops that are used in the drive. Mode 0: Current Loop (used primarily during drive setup) Mode 1: Velocity and Current Loops (used primarily during drive setup) Mode 2: Position, Velocity, and Current Loops (Default KAS Runtime mode) |
Related Topics
Using Command Source and Operating Modes for details on configuring the drive for your application.






