 MC_GrpReadStatus
MC_GrpReadStatus

Description
MC_GrpReadStatus returns the status of an axes group. This function block does not cause any motion. Refer to Group State Diagrams for details.
-
-
The following output is not currently supported. It will be supported in a future release.
- GroupHoming
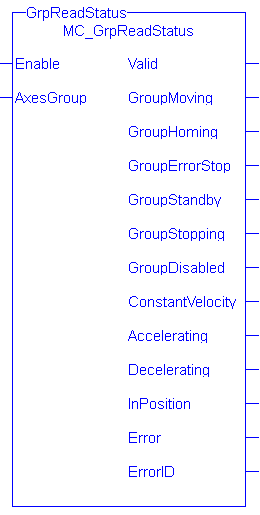
Figure 8-177: MC_GrpReadStatus
-
-
This function or function block returns cached data. See Programming a Dual Core Controller for more information.
Related Functions
Coordinated Motion, the top-level topic for Coordinated Motion.
Arguments
Input
| Enable | Description | If True, then the axes group status will be read. |
| Data type | BOOL | |
| Range | 0. 1 | |
| Unit | N/A | |
| Default | — | |
| AxesGroup | Description | The axis group from which the status will be read |
| Data type | AXIS_GROUP_REF | |
| Range | N/A | |
| Unit | N/A | |
| Default | — |
Output
| Valid | Description | True if valid outputs are available |
| Data type | BOOL | |
| GroupMoving 1 | Description | The axes group is in the Moving state, indicating that the group is enabled and currently executing a coordinated motion command. |
| Data type | BOOL | |
| GroupHoming 1 | Description | Not supported |
| Data type | BOOL | |
| GroupErrorStop 1 | Description | The axes group is in the ErrorStop state due to an axis error or group error. The group cannot accept coordinated motion commands. The execution of MC_GrpReset is required to change the group’s state from ErrorStop to Standby. |
| Data type | BOOL | |
| GroupStandby 1 | Description | The axes group is in the Standby state, meaning that the group is enabled and all its axes are enabled and the group is not currently executing a coordinated motion command. The axes group is ready to accept coordinated motion commands. |
| Data type | BOOL | |
| GroupStopping 1 | Description | The axes group is in the Stopping state due the execution of MC_GrpStop. The axes group is enabled but cannot accept coordinated motion commands while in the Stopping state. The axes group remains in the Stopping state while MC_GrpStop is executing and will remain in the Stopping state while MC_GrpStop’s Execute input is held high. |
| Data type | BOOL | |
| GroupDisabled 1 | Description | The axis group is in the Disabled state and cannot accept coordinated motion commands. |
| Data type | BOOL | |
| ConstantVelocity | Description |
True if the commanded path velocity is the same between the current scan of the application program and the previous scan. ConstantVelocity is always TRUE for Direct moves. The commanded path velocity of Direct moves is always zero. |
| Data type | BOOL | |
| Accelerating | Description | True if the commanded path velocity is accelerating between the current scan of the application program and the previous scan. |
| Data type | BOOL | |
| Decelerating | Description | True if the commanded path velocity is decelerating between the current scan of the application program and the previous scan. |
| Data type | BOOL | |
| InPosition | Description |
True indicates that the axes group is “in position”. The following must be true for the axes group to be “in position”:
|
| Data type | BOOL | |
| Error | Description | If True, an error has occurred. |
| Data type | BOOL | |
| ErrorID | Description | Indicates the error identifier if the Error output is set to TRUE. See the table in PLCopen Function Block ErrorID Output. |
| Data type | BOOL |
1 These outputs are mutually exclusive, meaning only one will be true at a time. All others will be false. Please refer to the Group State Diagrams.
Example
Structured Text
//Check boolean status bits for an Axis Group
Inst_MC_GrpReadStatus( EnableGrpReadStatus, Group1_Ref );
IsGroupMoving:= Inst_MC_GrpReadStatus.GroupMoving;
IsGroupErrorStop:= Inst_MC_GrpReadStatus.GroupErrorStop;
IsGroupStandby:= Inst_MC_GrpReadStatus.GroupStandby;
IsGroupDisabled:= Inst_MC_GrpReadStatus.GroupDisabled;
Accelerating:= Inst_MC_GrpReadStatus.Accelerating;
IsConstantVelocity:= Inst_MC_GrpReadStatus.ConstantVelocity;
IsInPosition:= Inst_MC_GrpReadStatus.InPosition;
IL
BEGIN_IL "Instruction list"
This is a low-level language and resembles assembly
"Instruction list"
This is a low-level language and resembles assembly
CAL Inst_MC_GrpReadStatus( EnableGrpReadStatus, Group1_Ref )
END_IL
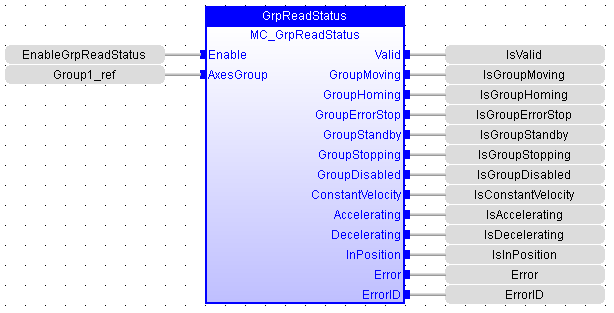
FBD
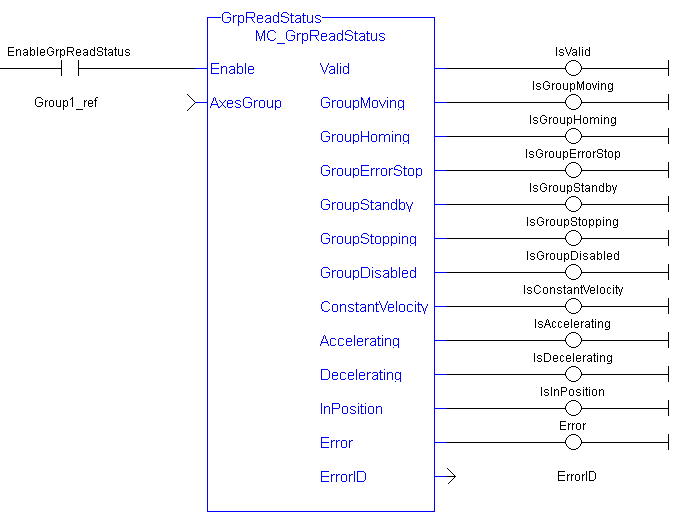
FFLD
 [Top]
[Top]





