Initialize and Start up a Pipe Network
The Motion State Machine is driven by the IEC![]() "International Electrotechnical Commission"
IEC is a not-for-profit, non-governmental international standards organization that prepares and publishes International Standards for all electrical, electronic and related technologies 61131-3 application with the help of dedicated function blocks.
"International Electrotechnical Commission"
IEC is a not-for-profit, non-governmental international standards organization that prepares and publishes International Standards for all electrical, electronic and related technologies 61131-3 application with the help of dedicated function blocks.
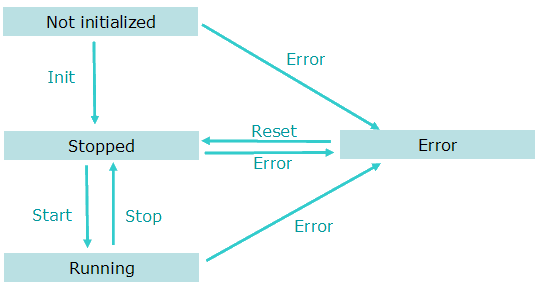
Figure 5-17: Motion State Machine
Each arrow represents a transition from one State to another one.
To start-up a Pipe Network in your IEC 61131-3 application program, you have to perform the following steps with their respective functions:
| Step | ML function blocks | Description |
|---|---|---|
| Motion Init | MLMotionInit | Initialization of the Motion is done with this dedicated function Set the Motion engine update rate. Wait for acknowledgement: MLMotionStatus() = MLSTATUS_INITIALISED to continue program operation |
| Create Cam Profiles | Profiles(MLPR_CREATE_PROFILES); | Create Cam Profiles from cam files |
| Create Pipe Network | PipeNetwork(MLPN_CREATE_OBJECTS); | |
| Motion Start | MLMotionStart | Starts the motion engine, motion bus driver, and initializes EtherCAT MLMotionStatus() = MLSTATUS_RUNNING to continue program operation |
| Power on all axes | PipeNetwork(MLPN_POWER_ON); | |
| Activate the pipes | PipeNetwork(MLPN_ACTIVATE); | |
| Connect the axes to the pipes | PipeNetwork(MLPN_CONNECT); | For example: in the following Pipe Network this function connects the Converter blocks (CNV1, CNV2 and CNV3) to the Axis blocks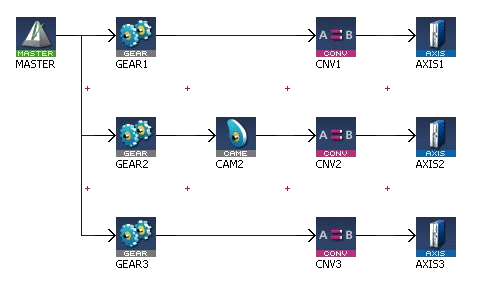 |
For more details on all ML function blocks related to motion, Motion Library






