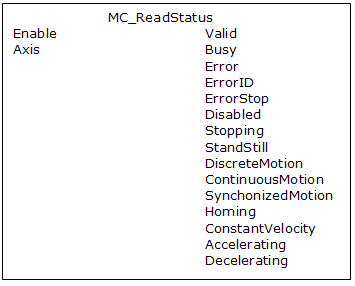
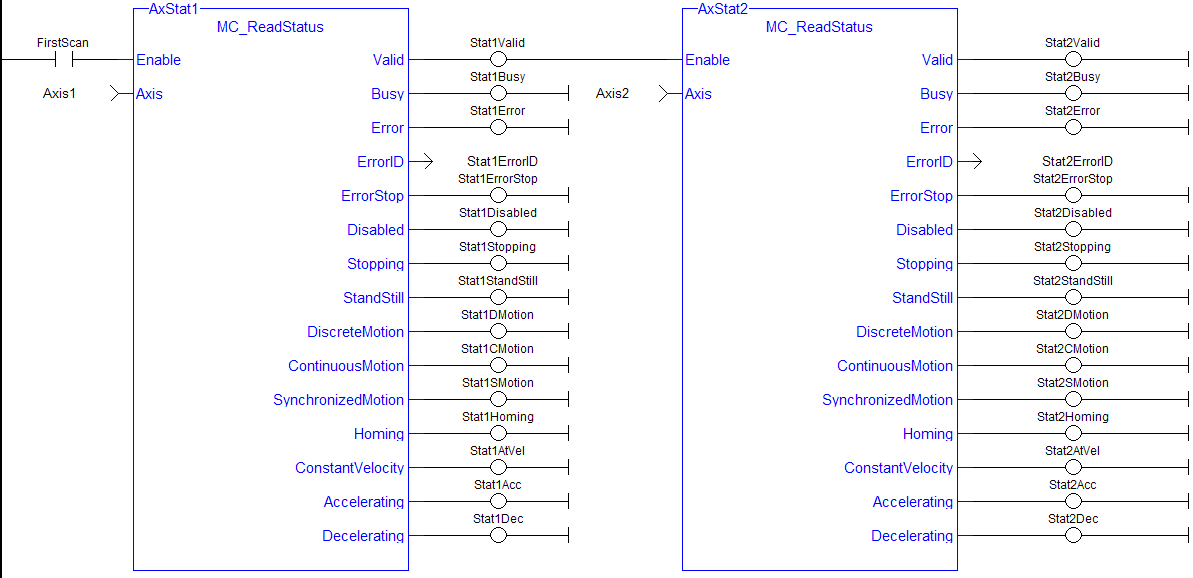
 MC_ReadStatus
MC_ReadStatus
Description
-
-
This function or function block returns cached data. See Programming a Dual Core Controller for more information.
Arguments
For more detail on how inputs and outputs work, refer to PLCopen Function Blocks - General Rules
Input
|
Enable |
Description |
Requests to read and return the axis status |
|
Data type |
BOOL |
|
|
Range |
0, 1 |
|
|
Unit |
N/A |
|
|
Default |
— |
|
|
Axis |
Description |
Name of a declared instance of the AXIS_REF library function. For more details,About Axis Name and Number |
|
Data type |
||
|
Range |
[1,256] |
|
|
Unit |
N/A |
|
|
Default |
— |
Output
|
Valid |
Description |
Indicates the outputs are valid |
|
Data type |
BOOL |
|
|
Busy |
Description |
Indicates this function block is executing |
|
Data type |
BOOL |
|
|
Error |
Description |
Indicates an invalid input |
|
Data type |
BOOL |
|
|
ErrorID |
Description |
Indicates the error if Error output is set to TRUE
|
|
Data type |
INT |
|
|
ErrorStop |
Description |
Indicates Error Stop state – E-stop or C-stop |
|
Data type |
BOOL |
|
|
Disabled |
Description |
Indicates Disabled state – open loop |
|
Data type |
BOOL |
|
|
Stopping |
Description |
Indicates Stopping state – MC_Stop command |
|
Data type |
BOOL |
|
|
StandStill |
Description |
Indicates Stand Still state – no move, closed loop |
|
Data type |
BOOL |
|
|
DiscreteMotion |
Description |
Indicates Discrete Motion state – programmed endpoint move is active |
|
Data type |
BOOL |
|
|
ContinuousMotion |
Description |
Indicates Continuous Motion state – unending, single-axis move is active |
|
Data type |
BOOL |
|
|
SynchronizedMotion |
Description |
Indicates Synchronized Motion state – slave move is active |
|
Data type |
BOOL |
|
|
Description |
Indicates Homing state – a homing cycle is currently executing |
|
|
Data type |
BOOL |
|
|
ConstantVelocity |
Description |
Indicates the axis is moving at a constant velocity |
|
Data type |
BOOL |
|
|
Accelerating |
Description |
Indicates the axis is accelerating |
|
Data type |
BOOL |
|
|
Decelerating |
Description |
Indicates the axis is decelerating |
|
Data type |
BOOL |
Example
Structured Text
(* MC_ReadStatus ST example *)
Inst_MC_ReadStatus( EnableRead, Axis1 );
//Inst_MC_ReadStatus is an instance of MC_ReadStatus function block
AxisStopping := Inst_MC_ReadStatus.Stopping; // store Stopping output to a user defined variable
AxisAccelerating := Inst_MC_ReadStatus.Accelerating; // store Accelerating output to a user defined variable
Ladder Diagram
 [Top]
[Top]





