CANopen Status Machine
The states of the status machine can be revealed by using the CANopen Status Word.
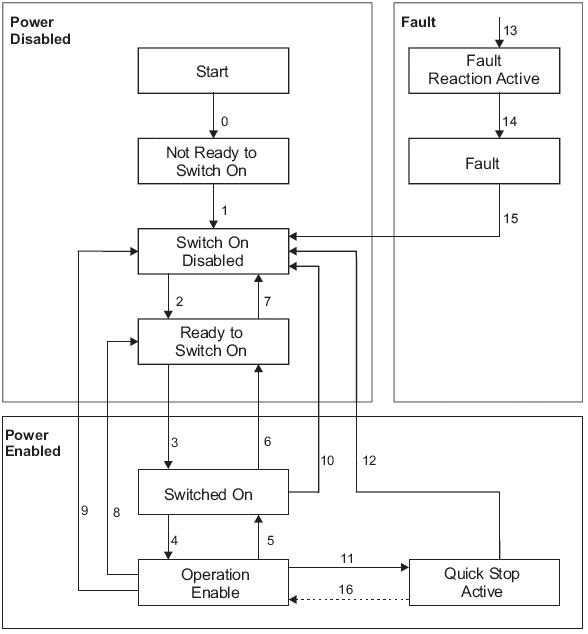
Figure 5-63: CANopen Status Machine
The start state is a pseudo-state indicating the start when the state machine is activated during the start-up sequence of the device drive's application software.
Status description
| Status | Description |
|---|---|
| Not ready to switch on | The drive is not ready to switch on. The controller has not indicated readiness for service. The drive is still in the boot phase or in the fault status |
| Switch on disabled | The drive cannot be enabled via the EtherCAT |
| Ready to switch on | The drive can be enabled via the control word. DC-link voltage can be switched on, parameters can be transferred, motion functions cannot be performed yet. |
| Switched on | The drive is enabled but the setpoints are not yet transferred from the EtherCAT interface. The drive is idle. DC-link voltage must be switched on, parameters can be transferred, but motion functions cannot be performed yet. Output stage is switched on (enabled). Operation Enable No fault present; output stage is enabled; motion functions are enabled. |
| Operation enabled | The drive is enabled and the setpoints are transferred from the EtherCAT interface. No fault present; output stage is enabled; motion functions are enabled. |
| Quick stop active | The drive has been stopped with the quick stop ramp; output stage is enabled; motion functions are not enabled. |
| Fault reaction active | A fault has occurred and the drive is stopped with the emergency stop ramp |
| Fault | A fault is active, and the drive has been stopped and disabled |
Transitions of the status machine
The drive device supports the transitions and actions as listed in the table below. The event initiates the transition. The transition is terminated after the action has been performed.
| Transition | Event | Action |
|---|---|---|
| 0 | Automatic transition after power-on or reset application | Drive device self-test and/or self initialization has to be performed. |
| 1 | Automatic transition | Communication has to be activated. |
| 2 | Shutdown command from control device or local signal | None |
|
3 |
Switch on command received from control device or local signal |
The high-level power has to be switched on, if possible. |
|
4 |
Enable operation command received from control device or local signal |
The drive function has to be enabled and all internal setpoints cleared. |
|
5 |
Disable operation command received from control device or local signal |
The drive function has to be disabled. |
|
6 |
Shutdown command received from control device or local signal |
The high-level power has to be switched off, if possible. |
|
7 |
Quick stop or disable voltage command from control device or local signal |
None |
|
8 |
Shutdown command from control device or local signal |
The drive function has to be disabled, and the high-level power has to be switched off, if possible. |
|
9 |
Disable voltage command from control device or local signal |
The drive function has to be disabled, and the high-level power has to be switched off, if possible. |
|
10 |
Disable voltage or quick stop command from control device or local signal |
The high-level power has to be switched off, if possible. |
|
11 |
Quick stop command from control device or local signal |
The quick stop function has to be started. |
|
12 |
Automatic transition when the quick stop function is completed and quick stop option code is 1, 2, 3 or 4, or disable voltage command received from control device (depends on the quick stop option code) |
The drive function has to be disabled, and the high-level power has to be switched off, if possible. |
|
13 |
Fault signal |
The configured fault reaction function has to be executed. |
|
14 |
Automatic transition |
The drive function has to be disabled; the high-level power has to be switched off, if possible. |
|
Fault reset command from control device or local signal |
A reset of the fault condition is performed, if no fault exists currently on the drive device; after leaving the Fault state, the Fault reset bit in the control word has to be cleared by the control device. |
|
|
16 |
Enable operation command from control device, if the quick stop option code is 5, 6, 7, or 8 |
The drive function has to be enabled. |






