 Current Loop
Current Loop
Overview
The current loop is active when the drive operates in current torque![]() Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist (current) mode (DRV.OPMODE = 0). The parameters that govern the current loop are shown in the Current Loop view. The various types of tuning for the drive adjust these parameters automatically, so you normally do not need to adjust the current loop parameters in the current loop screen. The Current Loop view includes an active block diagram. If you click on a block in the diagram, the appropriate tab opens below.
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist (current) mode (DRV.OPMODE = 0). The parameters that govern the current loop are shown in the Current Loop view. The various types of tuning for the drive adjust these parameters automatically, so you normally do not need to adjust the current loop parameters in the current loop screen. The Current Loop view includes an active block diagram. If you click on a block in the diagram, the appropriate tab opens below.
Current Loop Gain
The current loop is tuned based on the inductance of the motor used with the drive. The current loop gain is automatically set so that the idealized current loop crossover frequency is IL![]() "Instruction list"
This is a low-level language and resembles assembly.KP/L in rad/sec where L is the motor line-line inductance.
"Instruction list"
This is a low-level language and resembles assembly.KP/L in rad/sec where L is the motor line-line inductance.

Current loop gain is set automatically by the drive using the following methods:
- Option A. When a feedback device
 A process whereby some proportion of the output signal of a system is passed (fed back) to the input.
In automation, a device coupled to each motor to provide indication of the motor's shaft angle, for use in commutating the motor and controlling its speed and position is automatically identified by the drive and the motor data is automatically populated (Motor Autoset = 1) the proportional gain of the current loop (il.kp) is set based on the motor data and is shown as a read-only parameter in the current loop screen.
A process whereby some proportion of the output signal of a system is passed (fed back) to the input.
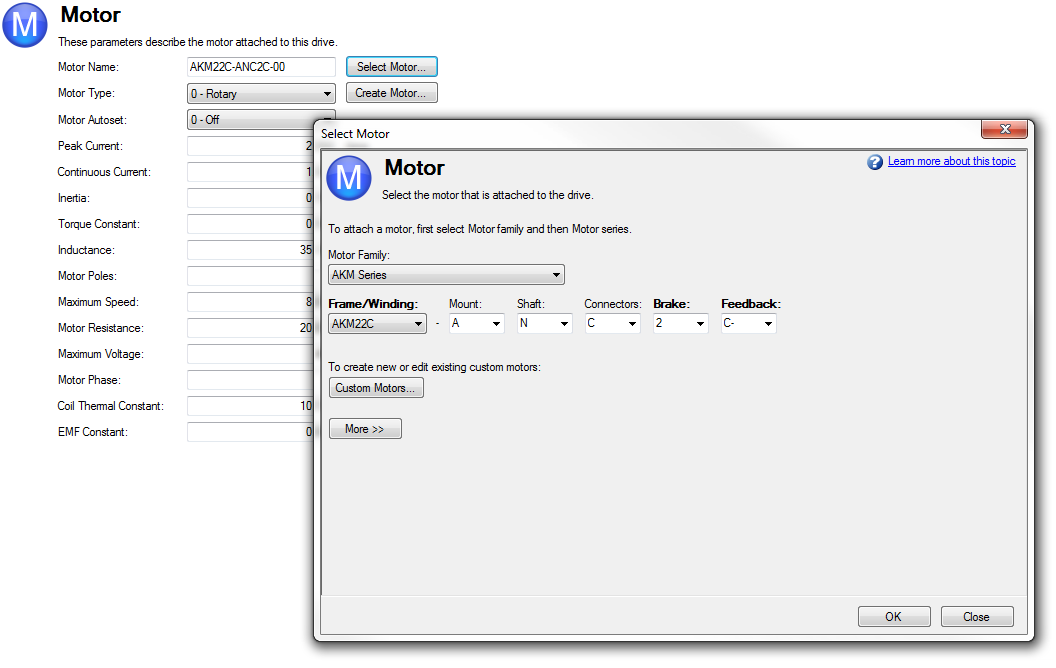
In automation, a device coupled to each motor to provide indication of the motor's shaft angle, for use in commutating the motor and controlling its speed and position is automatically identified by the drive and the motor data is automatically populated (Motor Autoset = 1) the proportional gain of the current loop (il.kp) is set based on the motor data and is shown as a read-only parameter in the current loop screen. - Option B.When the motor is selected using the motor database or using the custom motor tool, the imported inductance value is used to set the current loop proportional gain.

-
-
Manual adjustments to the current loop proportional gain parameter are not normally required during the motor tuning procedure. If manual adjustments are made to the current loop proportional gain parameter, repeating the motor setup procedure will overwrite the changes and restore the value to the Kollmorgen calculated value.
Related Parameters
DRV.OPMODE






