Set IL.MIMODE to 1 to use the 2t algorithm for motor protection. If MOTOR.ICONT has not been automatically configured, set it to the continuous rating of the motor. Then configure the warning and fault thresholds using IL.MI2TWTHRESH. and IL.MI2TFTHRESH.
Parameters
The following parameters are used for the motor load I2t algorithm.
IL.MI2T: Current motor load in [%].
IL.MI2TFTHRESH: Fault threshold in [%]. The AKD generates a fault F309 in case the IL.MI2T exceeds this fault threshold.
IL.MI2TWTHRESH: Warning threshold in [%]. The AKD generates a warning n309 in case that the IL.MI2T exceeds this warning threshold.
IL.MIMODE: Motor protection mode. This parameter determines whether the motor foldback algorithm or the I2t algorithm is responsible for the motor protection.
Functional description of the motor I2t algorithm
The connected motor can be protected using two different kinds of algorithms:
- Motor foldback as described in Foldback.
- The motor I2t algorithm.
The algorithm used by the AKD can be chosen using IL.MIMODE.
The motor I2t algorithm calculates continuously an artificial motor load value and limits the supplied current in case that the motor load reaches 100[%].
The motor load is calculated by applying a low pass filter with time constant τ to the I2 load.
Increasing motor load:
Decreasing motor load:
The variable iq describes the current generated by the AKD, which is responsible for achieving torque![]() Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist on the motor shaft whereas id describes the generated current, which has an impact on the electrical field of the motor.
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist on the motor shaft whereas id describes the generated current, which has an impact on the electrical field of the motor.
The motor load is described as an exponential function with the time constant τ calculated in the following manner:
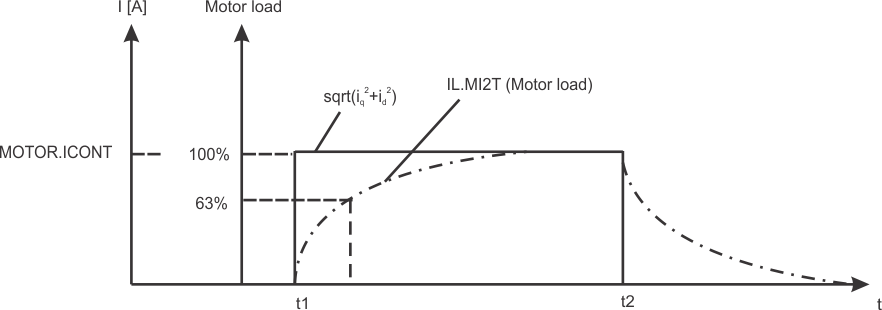
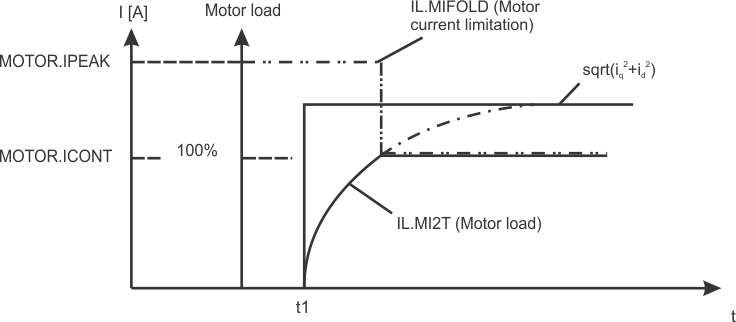
The figure below shows the progress of the motor load in case that continuous current is applied to the motor starting from t1 and in case that no current will be applied any more starting from t2. The motor load will reach a 100% value after 5*τ in case that continuous current is applied by the AKD.
A current limitation is used by the AKD in order to protect the motor-coil from overheating. The variable IL.MIFOLD , which is responsible for limiting the current in the motor windings (see Foldback) will be set to MOTOR.ICONT in case that IL.MI2T reaches a value of 100%. The value of IL.MIFOLD will be set to MOTOR.IPEAK as soon as the value of IL.MI2T falls under 95%. The following figure describes the limitation of the supplied current.
Details about IL.MI2T
IL.MI2T is calculated based on measured motor currents (IL.FB and IL.DFB). When the motor is disabled, instead of zero percent in IL.MI2T or 0 IL.FB/IL.DFB, there will be a small percentage number, usually 1-3% depending on the drive. This is caused by current measurement noise/resolution limit and is normal.






