 MLAxisInit
MLAxisInit
Description
Initializes an axis object. Returns TRUE if the function succeeded. The axis object can be mapped to servo or stepper drives.
Arguments
Input
|
AxisID |
Description |
ID Name of the Axis block |
|
Data type |
DINT |
|
|
Range |
— |
|
|
Unit |
N/A |
|
|
Default |
— |
|
|
ModuloPosition |
Description |
Value of the period of a cyclic system expressed in user units. The parameter is defined to correctly manage the periodicity (modulo) of the input values. |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit |
|
|
Default |
— |
|
|
UserUnitPerTurn |
Description |
Define the unit which is equivalent to one revolution of the physical motor. |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
N/A |
|
|
Default |
— |
|
|
FeedbackUnitPerTurn |
Description |
|
|
Data type |
DINT |
|
|
Range |
— |
|
|
Unit |
N/A |
|
|
Default |
— |
|
|
Speed |
Description |
Sets the Axis Speed |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
||
|
Default |
— |
|
|
Acceleration |
Description |
Sets the Axis Acceleration value |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit/sec2 |
|
|
Default |
— |
|
|
Deceleration |
Description |
Sets the Axis Deceleration value |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit/sec2 |
|
|
Default |
— |
|
|
InitialPosition |
Description |
Initial position value expressed in user logical units. Used only at the pipe activation to initialize the position starting point |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
||
|
Default |
— |
|
|
Modulo |
Description |
Define the mode which can be Modulo (True) or not (False) |
|
Data type |
BOOL |
|
|
Range |
0, 1 |
|
|
Unit |
N/A |
|
|
Default |
— |
Output
|
Default (.Q) |
Description |
Returns true when function successfully executes See more details here. |
|
Data type |
BOOL |
|
|
Unit |
N/A |
Example
Structured Text
MLAxisInit( PipeNetwork.Axis1, 360.0, 360.0, SHL(1,20), 500.0, 100000.0, 100000.0, 0.0, true ) ;
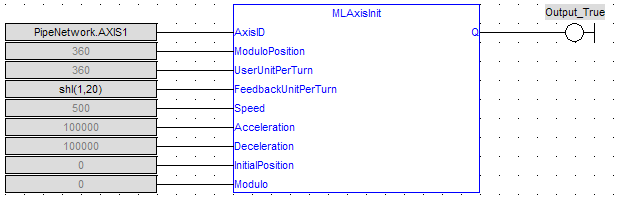
Ladder Diagram
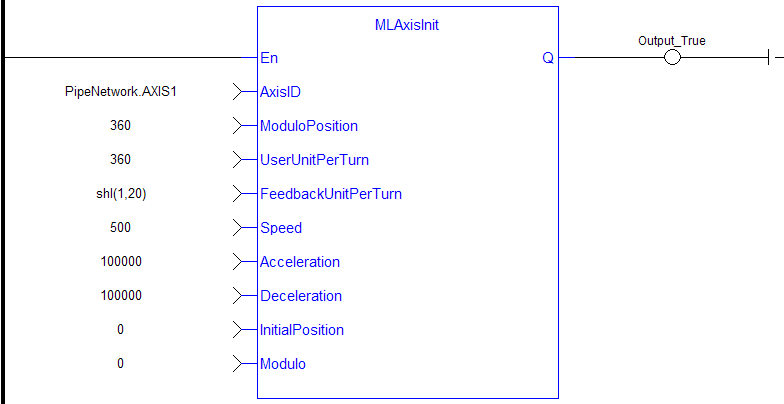
Function Block Diagram
 [Top]
[Top]





