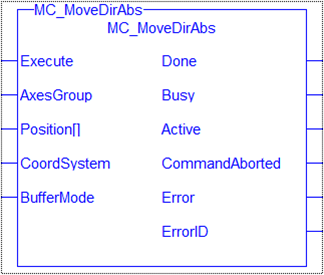
 MC_MoveDirAbs
MC_MoveDirAbs

Description
MC_MoveDirAbs commands the movement of an axes group to a specified absolute position in the specified coordinate system without taking care of how (on which path) the target position is reached.
-
-
- An error is returned if the group is in the GroupDisabled state.
- This function block does not have its own Acceleration, Deceleration, Velocity, and Jerk
 In physics, jerk is the rate of change of acceleration; more precisely, the derivative of acceleration with respect to time arguments. These are set using MC_AxisSetDefaults.
In physics, jerk is the rate of change of acceleration; more precisely, the derivative of acceleration with respect to time arguments. These are set using MC_AxisSetDefaults. - The maximum number of axes is set by the MaxNumberOfAxes input set in the MC_CreateAxesGrp function block.
- S-Curve motion is not currently supported. The Jerk input is currently ignored. S-Curve motion and the Jerk argument will be supported in a future release. .
When all motion is completed successfully, the state becomes GroupStandby.
Related Functions
MC_MoveDirRel, MC_ErrorDescription
Coordinated Motion, the top-level topic for Coordinated Motion.
Arguments
For more detail on how inputs and outputs work, refer to PLCopen Function Blocks - General Rules
Input
| Execute | Description | On the rising edge |
| Data Type | BOOL | |
| Range | 0, 1 | |
| Unit | N/A | |
| Default | — | |
| AxesGroup | Description | Reference to an axes group |
| Data Type | AXES_GROUP_REF | |
| Range | — | |
| Unit | N/A | |
| Default | — | |
| Position[ ] | Description |
Array of absolute end positions for each axis in the group. |
| Data Type | LREAL | |
| Range | [0, Number of axes in group - 1] | |
| Unit | N/A | |
| Default | — | |
| CoordSystem | Description |
The coordinate system used when commanding the direct absolute move Currently, only the ACS coordinate system is supported. See Coordinate Systems to learn more. |
| Data Type | SINT | |
| Range |
|
|
| Unit | N/A | |
| Default | — | |
| BufferMode | Description |
Defines the chronological sequence of the function block relative to the previous block. See the table in Buffer Modes. |
| Data Type |
SINT MC_BUFFER_MODE_ABORTING = 0 = Abort |
|
| Range | — | |
| Unit | N/A | |
| Default | — |
Output
| Done | Description | If True, then the command completed successfully. |
| Data type | BOOL | |
| Busy | Description | If True, then the function block is executing. |
| Data type | BOOL | |
| Active | Description | If True, then the function block is controlling motion. |
| Data type | BOOL | |
| CommandAborted | Description | If True, command was aborted by another function block. |
| Data type | BOOL | |
| Error | Description | If True, an error has occurred. |
| Data type | BOOL | |
| ErrorID | Description | Indicates the error if Error output is set to TRUE. See table in PLCopen Function Block ErrorID Output. |
| Data type | INT |
Example
Structure Text
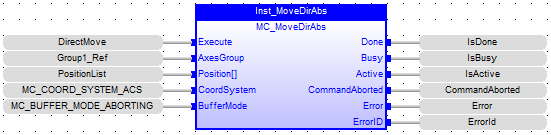
Inst_MC_MoveDirAbs( DirectMove, Group1_Ref, PositionList, MC_COORDSYSTEM_ACS, MC_BUFFER_MODE_ABORTING);
IL
BEGIN_IL"Instruction list"
This is a low-level language and resembles assembly
CAL Inst_MC_MoveDirAbs( DirectMove, Group1_Ref, PositionList, MC_COORD_SYSTEM_ACS, MC_BUFFER_MODE_ABORTING)
END_IL
Function Block Diagram
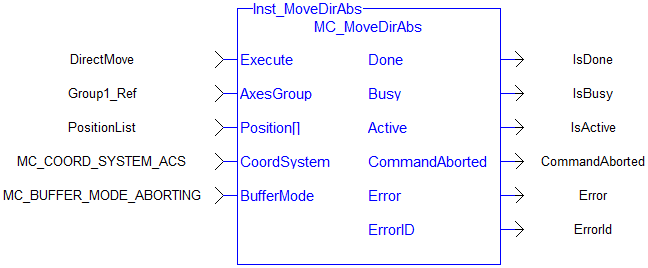
Ladder Diagram
 [Top]
[Top]





