MC_KIN_REF Structure
The MC_KIN_REF structure defines the robotic system transform type and its parameters. The parameters are specific to each transform type. The general MC_KIN_REF structure is described below, with further parameter specific descriptions for each robotic transform type.
|
Member |
Type |
Description |
Related Function Blocks |
|---|---|---|---|
|
TransformType |
UINT |
A number that identifies the specific robotic system transform. The #defines for the transform types (MC_TRANSFORM_TYPE_GANTRY, MC_TRANSFORM_TYPE_DELTA, etc.) are listed below. |
|
|
KinParameters[0 - 31] |
LREAL |
An array of up to 32 parameters to define the robotic system and its kinematic transform. The parameter count (0 to 32) and the definition of each parameter is determined by the specific TransformType |
These parameters must be specified for all ACS axes in the AxisGroup, and there are two parameters for each ACS axis.
|
TransformType |
Axis Mapping |
Parameter Count |
Parameter # |
Description |
Range |
|---|---|---|---|---|---|
|
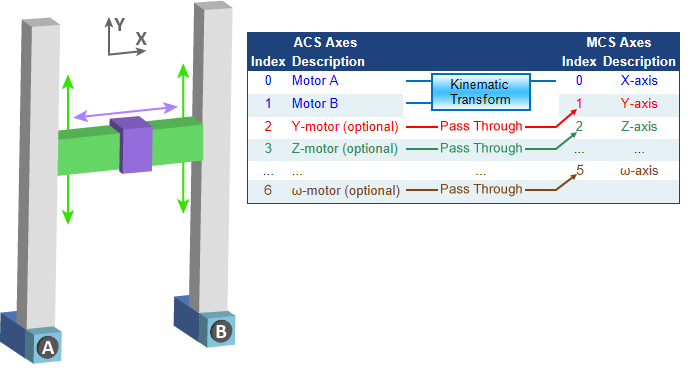
MC_TRANSFORM_TYPE_GANTRY |
|
1 |
MC_GANTRY_KIN_PARAM_REVERSE_X |
Reverse X-axis |
0 = do not reverse |
|
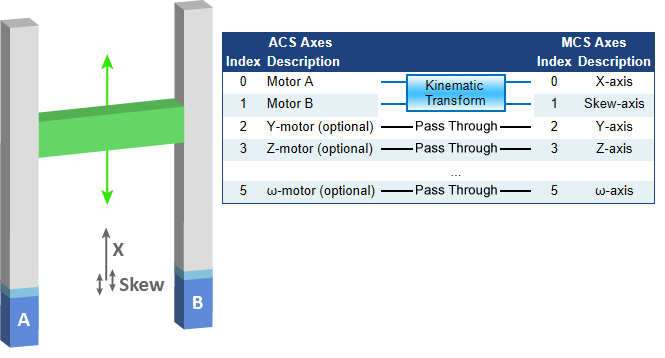
MC_TRANSFORM_TYPE_GANTRY_WITH_SKEW |
|
3 |
MC_GANTRY_WITH_SKEW_KIN_PARAM_REVERSE_X |
Reverse X-axis |
0 = do not reverse |
|
MC_GANTRY_WITH_SKEW_KIN_PARAM_SKEW_SCALE |
Skew to linear unit ratio |
Positive value |
|||
|
MC_GANTRY_WITH_SKEW_KIN_PARAM_REVERSE_SKEW |
Reverse Skew-axis |
0 = do not reverse |
|||
|
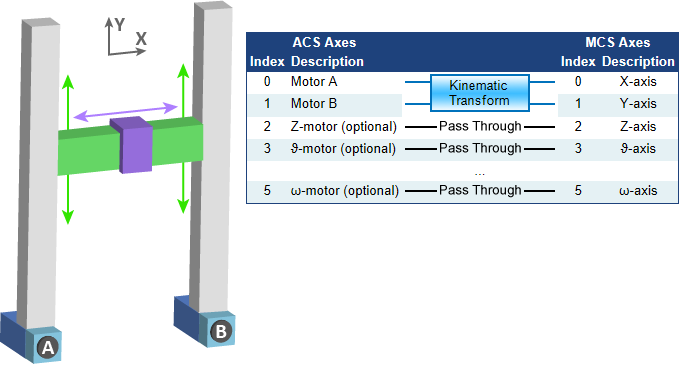
MC_TRANSFORM_TYPE_HBOT |
|
3 |
MC_HBOT_KIN_PARAM_LIN_TO_ROT_RATIO |
Linear to rotational unit ratio (ex: cm/degree) |
Positive value |
|
MC_HBOT_KIN_PARAM_REVERSE_X |
Reverse X-axis |
0 = do not reverse |
|||
|
MC_HBOT_KIN_PARAM_REVERSE_Y |
Reverse Y-axis |
0 = do not reverse |
|||
|
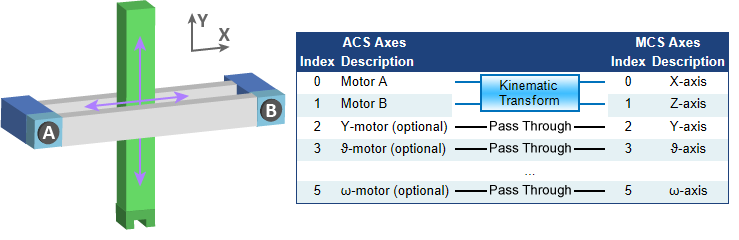
MC_TRANSFORM_TYPE_TBOT |
|
3 |
MC_TBOT_KIN_PARAM_LIN_TO_ROT_RATIO |
Linear to Rotational unit ratio (ex: cm/degree) |
Positive value |
|
MC_TBOT_KIN_PARAM_REVERSE_X |
Reverse X-axis |
0 = do not reverse |
|||
|
MC_TBOT_KIN_PARAM_REVERSE_Z |
Reverse Y-axis |
0 = do not reverse |
|||
|
MC_TRANSFORM_TYPE_DELTA |
|
4 |
MC_DELTA_KIN_PARAM_RADIUS_BASE_LENGTH |
RadiusBaseLength |
Positive, non-zero value |
|
MC_DELTA_KIN_PARAM_RADIUS_END_LENGTH |
RadiusEndLength |
||||
|
MC_DELTA_KIN_PARAM_MOTOR_ARM_LENGTH |
MotorArmLength |
||||
|
MC_DELTA_KIN_PARAM_END_ARM_LENGTH |
EndArmLength |
||||
|
MC_TRANSFORM_TYPE_SCARA_ELBOW_POS |
|
2 or 3
|
MC_SCARA_KIN_PARAM_UPPER_ARM_LENGTH |
RobotUpperArmLength |
Positive, non-zero value |
|
MC_SCARA_KIN_PARAM_LOWER_ARM_LENGTH |
RobotLowerArmLength |
||||
|
MC_SCARA_KIN_PARAM_WRIST_LENGTH |
RobotWristLength (Available for SCARA with wrist only) |
||||
|
MC_TRANSFORM_TYPE_SCARA_ELBOW_NEG |
|
2 or 3
|
MC_SCARA_KIN_PARAM_UPPER_ARM_LENGTH |
RobotUpperArmLength |
Positive, non-zero value |
|
MC_SCARA_KIN_PARAM_LOWER_ARM_LENGTH |
RobotLowerArmLength |
||||
|
MC_SCARA_KIN_PARAM_WRIST_LENGTH |
RobotWristLength (Available for SCARA with wrist only) |